научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2011
УДК 629.113
МГТУ им. Н.Э. Баумана
Очевидно, что современный мир не сможет существовать длительное время. Ситуация действительно выходит из-под контроля – экологические проблемы уже носят необратимый характер. С другой стороны, сегодня представить повседневную жизнь без транспорта невозможно. Он стал такой же неотъемлемой частью быта как здравоохранение, пропитание и кров. Необходимо найти баланс между ресурсами планеты и человеческими потребностями.
Такой баланс называется «экологически устойчивой транспортной системой», способной существовать длительное время не нанося необратимых изменений окружающей среде. Сегодня ситуация настолько далека от этого состояния, что такой разрыв не преодолеть за один рывок, и недостаточно решений Киотского протокола – нет инфраструктуры, нет технологий. Необходимо наметить промежуточные точки на этом пути.
Осложнён и процесс внедрения таких экологичных технологий на рынок. Они специфичны и потому дороги. Наиболее успешный управляющий за всю историю автомобильной промышленности Ли Якокка говорил: «главное – понять, что нужно потребителю». Потребитель не заинтересован в экологии – он заинтересован в прибыли. Значит, разработки должны сочетать в себе конкурентоспособные преимущества с экологической направленностью. В сфере коммерческого транспорта для автотранспортных предприятий – как для любого предприятия – справедлив приоритет прибыли. Прибыль напрямую зависит от производительности. Повысить производительность грузового автомобиля можно увеличив грузоподъёмность или сократив затраты времени на выполнение транспортной задачи. Если увеличение грузоподъёмности сводится к количеству опорных осей и, соответственно, регламенту, то сокращение времени имеет определённый потенциал: вопросы маневрирования содержат некоторые нераскрытые возможности. В данном контексте весьма перспективной видится концепция четырёхосных шасси с трансформируемым движителем.
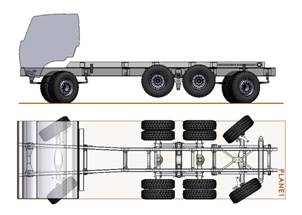
Концепция предполагает четырехосное шасси грузового автомобиля, выполненное с колесной формулой 8×6, отличающееся тем, что первая ось выполнена ведущей и управляемой на односкатной ошиновке, вторая и третья оси выполнены ведущими на двускатной ошиновке, неуправляемыми, подъёмными, четвёртая ось выполнена управляемой, ведомой на односкатной ошиновке, подъёмной. При этом связь между рулевыми трапециями первой и четвёртой осей выполнена гибкой с помощью гидравлического контура, управляемого специальным устройством в зависимости от режима движения, второй мост выполнен проходным. Раздаточная коробка выполнена с возможностью отключения общего привода на вторую и третью оси. Подобная идея позволяет сократить радиус поворота шасси за счёт смещения неуправляемых осей, как правило, балансирной тележки, ближе к середине длины рамы (рис. 1).
|
|
Рис. 1. Поворот шасси при всех опорных осях. | Рис. 2. Поворот шасси с минимальным радиусом. |


Однако, дополнительные возможности открывает подъём неуправляемых осей в порожнем состоянии – это позволяет обеспечить режим, когда все опорные оси являются управляемыми. Тогда возможен поворот с минимальным радиусом (рис. 2), а также режим движения параллельным переносом – так называемый крабовый ход (рис. 3).
В условиях ограниченного пространства, например, на стройплощадках, показатели манёвренности зачастую получают наивысший приоритет. Поэтому весьма целесообразно исследовать режим поворота подобного шасси при скольжении задних осей. Это возможно благодаря подъёму четвёртой оси, что освобождает её от износа, а несущую систему шасси – от поперечной реакции на колёсах этой оси (рис. 4).
|
|
Рис. 3. Движение шасси параллельным переносом. | Рис. 4. Поворот шасси с подтормаживанием осей тележки. |

Углубляясь в данное направление, полезно оценить опыт легковых автомобилей. Существует многолетняя практика серийного применения активных межколёсных дифференциалов, увеличивающих поворачивающий момент колёсной машины при криволинейном движении. Интерес представляет установление взаимосвязи распределения крутящего момента по осям с показателями манёвренности методами математического моделирования с учётом аспектов конструктивной реализации нового метода поворота.
Для исследования данного вопроса были выдвинуты следующие задачи:
1. Создание, отладка и проверка адекватности математических моделей различных процессов криволинейного движения колёсного шасси;
2. Моделирования регламентированных стандартом испытаний;
3. Оценка результатов моделирования.
Сферой интересов является поворот с минимальным радиусом. Велосипедная схема оправдана, две оси, теория линейного увода, 5 обобщённых координат: продольное и поперечное перемещение центра масс шасси, его поворот вокруг вертикальной оси, угловые перемещения переднего и заднего колёс (рис. 5). Ключевое влияние на процесс движения оказывает взаимодействие колёсного движителя с опорной поверхностью. За основу были взяты результаты работы А. Б. Дика [1] (рис. 6, 7, 8).

Рис. 5. Велосипедная схема и положение центра масс исследуемого прототипа.

Рис. 6. Обобщённая “f – S” диаграмма.
Коэффициент продольного взаимодействия есть отношение продольной реакции в пятне контакта к вертикальной реакции на колесе. Зависимость этого коэффициента от продольного скольжения и угла увода представлена на рис. 7; а зависимость коэффициента поперечного взаимодействия от тех же параметров на рис. 8.

Рис. 7. Характеристики продольного проскальзования, шина И-259; Pz = 5,1 кН; pв = 170 кПа; V = 8 м/с. (сплошные линии – эксперимент, пунктирные кривые – расчёт).
Углы увода: 1 – 0 рад; 2 – 0,035 рад; 3 – 0,079 рад; 4 – 0,151 рад; 5 – 0,21 рад; 6 – 0,279 рад; 7 – 0,401 рад.

Рис. 8. Образец записей зависимостей Ry = f(Rx). шина И-259; Pz= 4,76 кН; pв = 170 кПа; V = 8 м/с.
Углы увода: 1 – 0,043 рад; 2 – 0,079 рад; 3 – 0,151 рад; 4 – 0,21 рад; 5 – 0,401 рад.
Таким образом, для задания описанной модели взаимодействия шины с опорной поверхностью в математической модели необходимо получить взаимосвязь четырёх параметров: коэффициентов продольного и поперечного взаимодействия, продольного скольжения и угла увода.

Рис. 9. Зависимость коэффициента продольного взаимодействия от продольного скольжения и угла увода. | Рис. 10. Зависимость коэффициента поперечного взаимодействия от продольного скольжения и угла увода. |
Если построить для каждого угла увода обобщённую поверхность, связывающую три других параметра, то она будет образована эллипсами взаимодействия для каждых значений продольного скольжения колеса (рис. 11). Поверхность изменяется с ростом угла увода, это можно отследить по сечениям поверхности плоскостями постоянной величины продольного скольжения – эллипсам взаимодействия.

Рис. 11. Поверхность, образованная эллипсами взаимодействия, в зависимости от продольного скольжения при высоком значении угла увода.
С ростом угла увода составляющая поперечного коэффициента взаимодействия возрастает, а продольного – падает.
Для исследуемого прототипа выстраивается следующая логическая цепочка: вертикальная нагрузка на заднее колесо выше, значит там реализуется большая продольная сила, поэтому задняя ось не позволит перемещаться продольно, тогда передняя ось будет буксовать, продольное скольжение переднего колеса будет стремиться к 1, значит, согласно зависимостям Дика А.Б. [1], боковая реакция на переднем колесе существенно сократится, примет минимальное значение.
Переднее колесо является управляемым, в данном режиме (разворот) оно повёрнуто на угол, близкий к максимальному. Оставшаяся продольная реакция на колесе разложится на две составляющих: продольно оси шасси и поперечно этой оси [2]. Первая составляющая компенсируется продольной реакцией заднего колеса [3], продольного движения по-прежнему нет. Вторая составляющая продольной реакции переднего колеса – поперечно оси автомобиля – становится поворачивающей силой вокруг пятна контакта заднего колеса с плечом, равным базе. Происходит поворот с буксованием передней оси и юзом задней. Предельный случай – заднее колесо заблокировано. Возможны варианты и рассогласования угловых скоростей вращения переднего и заднего колёс, первая должна существенно превышать вторую (рис. 12, 13). При этом подобный режим не противоречит предлагаемой концепции шасси [4].

Рис. 12. Схема поворота со скольжением передней оси и юзом задней.

Рис. 13. Поворот со скольжением передней оси и юзом задней.

Рис. 14. Траектории движения переднего колеса, центра масс и заднего колеса при угловой скорости вращения заднего колеса 1 рад/с, и вариации угловой скорости переднего колеса: 50 рад/с, 100 рад/с, 200 рад/с.
Созданная математическая модель позволяет исследовать влияние рассогласования угловых скоростей колёс на диаметр разворота в данном режиме, удалось установить, что при вариации угловой скорости как переднего (рис. 14), так и заднего колеса (рис. 15), меньший диаметр поворота соответствует большей величине отношения угловой скорости переднего колеса к угловой скорости заднего. Обеспечить рассогласование позволяет гибкая тормозная система, способная затормаживать колёса или оси избирательно [5].

Рис. 15. Траектории движения переднего колеса, центра масс и заднего колеса при угловой скорости вращения переднего колеса 100 рад/с, и вариации угловой скорости заднего колеса: 0.1 рад/с, 1 рад/с, 2 рад/с, 4 рад/с.
Итак, исследование режима выявило, что с ростом отношения угловых скоростей диаметр разворота падает, смещение от начальной точки сокращается.
Обобщение результатов позволяет сформулировать выводы. Рассогласование угловых скоростей эффективно (диаметр сокращается вплоть до минимально возможного значению, соответствующему повороту шасси вокруг центральной точки заднего моста) [6]. Наряду с этим режим характеризуется высоким износом шин (продольное скольжение стремится к единице, поперечное скольжение тоже велико) и нагруженностью трансмиссии.
Заключение: поворот со скольжением передней оси и юзом задней оси оправдан в тех применениях, где наибольшую важность представляет манёвренность в сочетании с средним и длинным плечом ездки.
Совокупное улучшение показателей манёвренности за счёт ряда эффективных режимов поворота колёсных машин с трансформируемым движителем позволяет существенно повысить производительность автомобиля в условиях ограниченного пространства, что на сегодняшний день является всё более популярной задачей для автотранспортных предприятий.
Литература
1. Дик А.Б. Расчет стационарных и нестационарных характеристик тормозящего колеса при движении с уводом. Диссертация на соискание ученой степени кандидата технических наук. – Омск. САДИ, 1988. – 224 с.
2. Ларин В.В. Теория движения полноприводных колёсных машин: учебник / В.В. Ларин. – М. : Изд-во МГТУ им. Н.Э. Баумана, 2010. – 391, [1] с.: ил.
3. Проектирование полноприводных колёсных машин: Учебник для вузов: В 3 т. Т. 3 / Б.А. Афанасьев, Б.Н. Белоусов, Л.Ф. Жеглов и др.; Под ред. А.А. Полунгяна. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. – 432 с.: ил.
4. Гладов Г.И., Саркисов П.И. Анализ влияния расположения осей на управляемость четырёхосных колёсных машин // Проектирование колёсных машин. Материалы Всероссийской научно-технической конференции, посвящённой 100-летию начала подготовки инженеров по автомобильной специальности в МГТУ им. Н.Э. Баумана 25-26 ноября 2009 г. – 2009. – с. 83-85.
5. ГОСТ Р 41.13—99 (Правила ЕЭК ООН № 13). Единообразные предписания, касающиеся официального утверждения механических транспортных средств категорий M, N и O в отношении торможения. [Текст]. – Введ. 1999–05–26. – М.: Госстандарт России: Изд-во стандартов, 2006 – II, 113 с.: ил.
6. ГОСТ Р 52302-2004. Автотранспортные средства. Управляемость и устойчивость. Технические требования. Методы испытаний. [Текст]. – Введ. 2006–01–01. – М.: Госстандарт России: Изд-во стандартов, 2005 – III, 27 с.: ил.
Публикации с ключевыми словами: подъёмные оси, манёвренность, четырёхосное шасси, диаметр разворота
Публикации со словами: подъёмные оси, манёвренность, четырёхосное шасси, диаметр разворота
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||