научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2011
УДК. 21474 05.13.00
МГТУ им. Н. Э. Баумана, ИУ4
Введение
В настоящее время широкое распространение получила компактная цифровая фото и видео техника. Качество изображения получаемого с помощью такой техники постоянно растет, и на текущий момент вплотную приблизилось к качеству изображения, получаемого с помощью профессиональной техники. Однако, задача стабилизации изображения при съемке с подвижных объектов (автомобиль, радиоуправляемые самолеты и вертолеты, съемка при ходьбе и т.д.) до сих пор не имеет решений, сопоставимых по стоимости и массогабаритным характеристикам самой технике. В данном проекте решаемой задачей является создание прототипа системы стабилизации, который может быть в дальнейшем использован для разработки полноценной системы стабилизации, удовлетворяющей требованиям компактности и низкой стоимости.
1. Классификация систем стабилизации
Существует множество видов систем стабилизации, отличающихся по принципу действия, количеству стабилизируемых осей, предельным значениям отклонений и прочим характеристикам. Рассмотрим некоторые из самых распространенных систем.
· Механические системы с противовесами (рис. 1.1, а) – для стабилизации камеры используется штанга с противовесами, на которые действует сила тяжести, всегда направленная вниз. К достоинствам можно отнести крайне простую конструкцию и высокую надежность. Однако недостатками является возможность стабилизации только относительно одной или двух осей, вероятность раскачивания штанги, отсутствие автоматического управления.
· Механические системы с гироскопами (рис. 1.1, б) – в качестве стабилизирующего устройства используют гироскопы с массивными металлическими дисками, вращающимися с высокой скоростью (достигают десятков тысяч оборотов в минуту). К достоинствам данных систем можно отнести высокое качество стабилизации, высокую надежность. Недостатками являются большая масса (соизмеримая с массой полезной нагрузки), высокое энергопотребление, вплоть до десятков ватт, а также крайне высокую стоимость в связи высочайшим требованиям к качеству дисков и двигателей.
· Оптические системы (рис. 1.1, в) – стабилизация происходит путем введения подвижного элемента в оптическую систему. Как правило, такие системы имеют крайне низкий предел максимального отклонения (единицы градусов). Обладают высокой компактностью, за счет небольших размеров подвижного элемента. Могут использоваться в сочетании с другими системами стабилизации.
· Электромеханические системы (рис. 1.1, г) – в данном виде систем, поворот камеры осуществляется электродвигателями, как правило, управляемых микропроцессором. Угол отклонения может определяться гироскопами различных типов. К достоинствам таких автоматического управления. К недостаткам относится высокая сложность систем.

Рисунок 1.1 – Некоторые виды систем стабилизации
Разрабатываемый прототип системы стабилизации можно отнести к электромеханической системе, в которой в качестве чувствительного систем можно отнести компактность, а также гибкость настройки, возможность элемента используется МЭМС гироскоп. Данный тип системы стабилизации выбран как оптимальный для решения поставленной задачи, ввиду наибольшей гибкости системы при сравнительно компактных размерах и низкой стоимости.
2. МЭМС гироскопы
Микроэлектромеханические Системы (МЭМС) – технологии и устройства, объединяющие в себе микроэлектронные и микромеханические компоненты. Область применения МЭМС технологии крайне широка. Данная технология используется для создания на подложке кремния таких приборов как акселерометр, гироскоп, микрофон, магнитометр и прочих устройств, требующих наличия механических элементов. Получаемые устройства в большинстве случаев имеют линейные размеры меньше 1 мм, что открывает новые возможности для современной науки и техники.
Одним из видов МЭМС микросхем являются гироскопы, позволяющие определять скорость вращения устройства вокруг одной или нескольких осей. Преимуществом этих гироскопов перед гироскопами другого типа состоит в компактности, вплоть до моделей размером 4х4х1 мм [1] и низкой рыночной стоимости (от 3$ за единицу).
МЭМС гироскопы относятся к вибрационным гироскопам. Принцип действия состоит в отклонении постоянно колеблющегося грузика, во время вращения, под действием силы Кориолиса. Данное отклонение определяется за счет изменения электрической емкости между грузиком и специальными пластинами, что фиксируется специальной электрической схемой, которая выдает напряжение, пропорциональное величине отклонения грузика. На рисунке 2.1 представлено изображение с микроскопа, показывающее внутреннюю структуру МЭМС гироскопа L3G4200D [2].
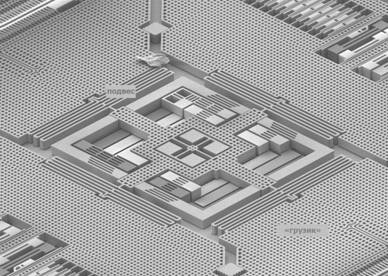
Рисунок 2.1 – Устройство гироскопа L3G4200D
Существуют аналоговые и цифровые МЭМС гироскопы. Выходной сигнал аналоговых гироскопов представляет собой напряжение, пропорционально изменяющиеся в зависимости от скорости вращения, причем при вращении в одну сторону напряжение увеличивается, а при вращении в другую сторону, наоборот, уменьшается. Данные гироскопы требуют подключения аналого-цифровой преобразователь АЦП для совместного использования с микропроцессором. Принцип действия цифровых гироскопов аналогичен, однако АЦП встроен непосредственно в микросхему, а данные могут считываться через различные цифровые интерфейсы, что значительно улучшает качество сигнала, за счет сокращения помех, наведенных на аналоговую линию между датчиком и АЦП. Различные модели гироскопов могут определять вращение вокруг разного количества осей, от одной до трех.
На сегодняшний день основными производителями МЭМС гироскопов являются две фирмы - STMicroelectronics и AnalogDevices. На рис. 2.2 представлен внешний вид самой последней модели цифрового гироскопа L3G4200D от STMicroelectronics. Наиболее схожим по характеристикам аналогом является гироскоп ADXRS450 от AnalogDevices.

Рисунок 2.2 – Внешний вид гироскопа L3G4200D
Современные МЭМС гироскопы позволяют добиться точности ухода от нулевого положения в пределах 5˚-25˚ в час [3], что является удовлетворительной характеристикой для разрабатываемой системы стабилизации. Кроме того, тенденции таковы, что в течение нескольких лет эта характеристика может сильно улучшиться. При этом габариты, стоимость и энергопотребление МЭМС гироскопов не имеют себе равных среди других типов гироскопов.
3. Система стабилизации на базе МЭМС гироскопа
Принцип действия системы стабилизации состоит в постоянном опросе цифрового МЭМС гироскопа, для получения значения текущей угловой скорости и придание такой же скорости механизму подвески, однако в противоположном направлении, чтобы компенсировать вращение камеры. Упрощенная модель прототипа системы представлена на рис. 3.1.
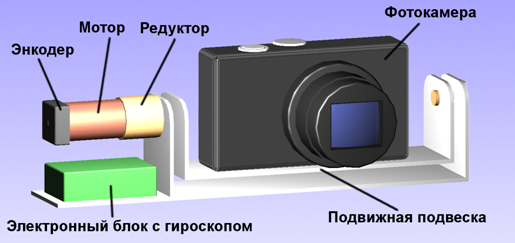
Рисунок 3.1 – Модель прототипа системы стабилизации
Для получения информации о текущем положении подвески используется энкодер, установленный на вал электродвигателя. Данный прототип рассчитан на стабилизацию только по одной оси, однако в дальнейшем система может быть расширена до двух или трех осей стабилизации, что позволит исключить нежелательные движения камеры при любом повороте основания системы стабилизации. В качестве микроконтроллера обеспечивающего работу системы планируется использовать микроконтроллер серии AVRXMEGA работающий на тактовой частоте 32 МГц.
4. Практическая реализация
На первом этапе практической реализации были разработаны печатные платы для подключения МЭМС гироскопов к микроконтроллеру, для определения типа и конкретной модели гироскопа, подходящего для работы в системе стабилизации. Результатом разработки явились две платы, с аналоговым гироскопом LPR530AL [4] (рис. 4.1, а) и цифровым гироскопом L3G4200D (рис. 4.1, б).

Рисунок 4.1 – Печатные платы для тестирования гироскопов
Как видно, аналоговый гироскоп требует множество дополнительных внешних компонентов для работы, в отличие от цифрового гироскопа. Кроме того, полученные с цифрового гироскопа данные оказались более точными. Таким образом, для дальнейшей разработки был выбран цифровой гироскоп L3G4200D.
Литература
1. Алексей Дрожжин, MEMS: микроэлектромеханические системы, [электронный ресурс http://www.3dnews.ru/editorial/MEMS-microelectromechanical-systems-Part-1] , (дата обращения 05.02.2011)
2. AnalogDevices, ADXRS450 [электронный ресурс http://www.analog.com/en/mems/gyroscopes/adxrs450/products/product.html?ref=ASC-PR-401 ], (дата обращения 05.02.2011).
3. STMicroelectronics, LPR530AL [электронный ресурс http://www.st.com/stonline/books/pdf/docs/15812.pdf], (дата обращения 05.02.2011).
4. Мысловский Э.В., Власов А.И., Акристиний М.В. Микроконтроллеры // Электронные компоненты, №5. 2002. С.47-50.
5. В.А.Шахнов, А.И.Власов, Ю.А.Поляков, А.С.Кузнецов Нейрокомпьютеры: Архитектура и схемотехника // ChipNews, №1, 2001.
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||