научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 08, август 2011
МГТУ им. Н.Э. Баумана
Рассмотрен микроактюатор в форме сферического купола, свободно опирающегося на плоскость внешним контуром (рис.1). Геометрические размеры купола имеют следующие знаяения: диаметр основания D=5 мм, радиус кривизны купола в недеформированном состоянии Rm=22,2 мм, суммарная толщина двух слоев h=0,04 мм. Слои имеют следующие физико-механические характеристики: для активного слоя: модуль упругости Е1=1.35х105 МПа, коэффициент Пуассона μ1=0.3, температурный коэффициент линейного расширения α1=18.0х10-6 1/Сº. Для пассивного слоя: модуль упругости Е2=1.50х105 МПа, коэффициент Пуассона μ2=0.3, температурный коэффициент линейного расширения α2=1.0х10-6 1/Сº. Т.о. купол считается тонкой пологой оболочкой.
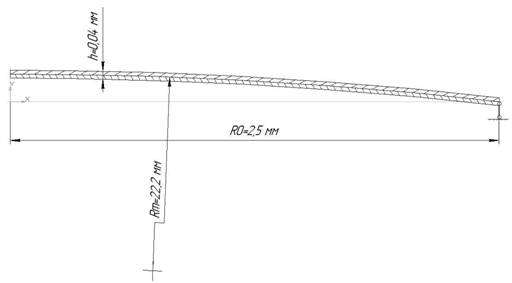
Рис. 1. Микроактюатор в форме сферического купола
С учетом геометрических соотношений и уравнений равновесия для осесимметричных оболочек получаем основную систему уравнений:
 (1)
(1)
где ![]() - вектор неизвестных в текущем состоянии оболочки,
- вектор неизвестных в текущем состоянии оболочки,
u, v – горизонтальная и вертикальная составляющие перемещения,
![]() – угол поворота нормали,
– угол поворота нормали,
U, V - горизонтальная и вертикальная составляющие внутреннего усилия,
![]() – меридиональный момент.
– меридиональный момент.
В основной системе уравнений (1) приняты следующие вспомогательные обозначения:
 (2)
(2)
 (3)
(3)
где ![]() - угол наклона касательной к меридиану в недеформированном состоянии.
- угол наклона касательной к меридиану в недеформированном состоянии.
Основной задачей, возникающей при численном анализе процесса деформирования термобиметаллических элементов, является определение рабочей характеристики, т.е. зависимости между перемещением характерной точки элемента и изменением температуры окружающей среды – T. Данная задача была решена с помощью метода продолжения по параметру.
НДС купола описывается системами уравнений (1) – (3). В силу пологости оболочки горизонтальными распределенными силами инерции qu пренебрегаем.
Для возможности реализации численного счета малая область в центре купола считается абсолютно жесткой. Граничные условия соответствуют условиям шарнирного опирания:
 (6)
(6)
По полученным граничным условиям на каждом шаге итерации вычисляем следующие невязки:
 (7)
(7)
Имеем нелинейную краевую двухточечную задачу, которая решается методом Ньютона:
![]() , (8)
, (8)
где ![]() - вектор невязок на k-ом шаге итерации; J– матрица Якоби, вычисляемая при помощи интегрирования системы с пробными начальными векторами:
- вектор невязок на k-ом шаге итерации; J– матрица Якоби, вычисляемая при помощи интегрирования системы с пробными начальными векторами:
 (9)
(9)
Для интегрирования системы из 6-ти дифференциальных уравнений используется метод Рунге-Кутта 4-го порядка точности. Для определения сходимости итерационного процесса выбрана евклидова норма невязок:
 (10)
(10)
Решение задачи с шагом по параметру разбивается на последовательность нелинейных задач, каждая из которых решается методом Ньютона. В качестве "опорного" решения на первом шаге принимается недеформированное состояние при нулевой температуре, на втором – линейная экстраполяция решения. На всех последующих шагах по параметру начальное приближение определяется с помощью формулы Лагранжа:
![]() (11)
(11)
Характеристика микроактюатора представляет собой график зависимости прогиба в центре оболочки от температуры (рис. 2). Ветвь графика BD соответствует равновесным, но неустойчивым состояниям. При шаге по температуре точки B и D являются "особыми", то есть матрица Якоби становится вырожденной. В этих условиях продолжение решения становится невозможным, поэтому за параметр продолжения принимается прогиб оболочки в центре, а температура считается зависимой переменной. Для удобства численной реализации такого приема введем расширенный вектор состояния оболочки:
![]() (12)
(12)

Рис. 2. Характеристика микроактюатора
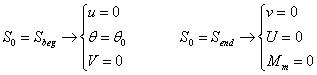
Изменение формы деформированного меридиана оболочки при нагревании показано на рис. 3.
Рис. 3. Изменение формы меридиана микроактюатора
Решение было выполнено для последовательного ряда задач с различными радиусами кривизны. Результаты представлены на рис. 4. Сравнение характеристик ТБ-элементов для некоторых значений радиусов показано на рис. 5.
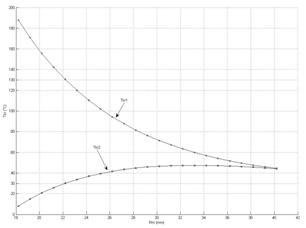
Рис. 4. Зависимость критических температур от радиуса кривизны
При решении задачи в динамической постановке предполагается, что температура линейно зависит от времени по закону:
![]() (13)
(13)
Вертикальная составляющая силы инерции вычисляется на основе предыдущих значений прогибов. После “прохлопывания” оболочка деформируется так же, как при статическом нагревании.
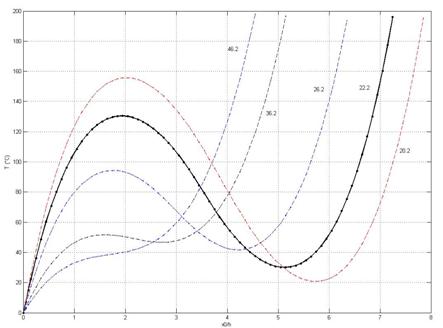
Рис. 5. Сравнение характеристик ТБ-элементов с различными радиусами
Для расчета осесимметричной деформации ТБ-элемента создана программа на языке С++, позволяющая вычислять все необходимые характеристики микроактюатора.
Послойно решается краевая задача, а также начальная задача по времени - методом конечных разностей по явной схеме. Динамическая характеристика микроактюатора представлена на рис. 6, точка С показано крупно на рис. 7.

Рис. 6. Динамическая характеристика микроактюатора
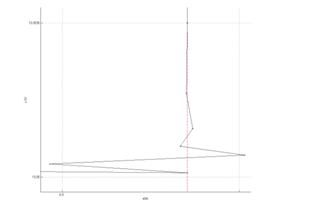
Рис. 7. Динамическая характеристика микроактюатора
Жесткостная характеристика микроактюатора для случая силового нагружения (деформированная форма показаны на рис. 8) была построена с помощью конечно-элементного комплекса ABAQUS (см. рис. 9).
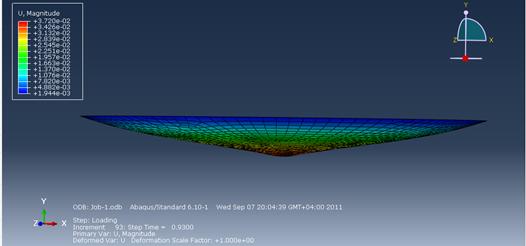
Рис. 11. Деформированная форма
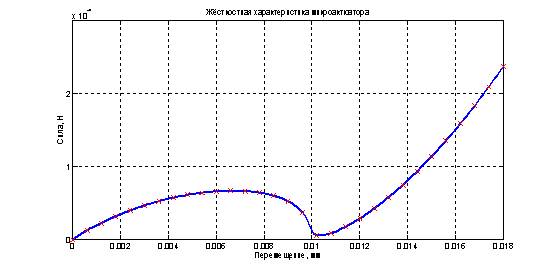
Рис. 12. Жесткостная характеристика микроактюатора, построенная с помощью ABAQUS
Автор выражает благодарность научному руководителю Гаврюшину С.С. за постановку задачи и полезные советы.
ВЫВОДЫ
В работе проведен анализ процесса деформирования микроактюатора, в ходе которого решена краевая и начальная задачи. Исследована рабочая характеристика микропереключателя и влияние на нее геометрических параметров и сил инерции.
Список литературы
1. Гаврюшин С.С., Коровайцев А.В. Методы расчета элементов конструкций на ЭВМ. -M.: Изд-во ВЗПИ, 1991.-160c.
2. Валишвили Н.В. Методы расчета оболочек вращения на ЭЦВМ. М.: Машиностроение, 1976. – 278 с.
3. Гаврюшин С.С. Численный анализ и синтез гибких элементов конструкций с управляемой упругой деформацией. УДК 539.3:621.01
4. Гаврюшин С.С., Барышникова О.О., Борискин О.Ф. Численные методы в проектировании гибких упругих элементов – Калуга, 2001. – 205 с.
5. Демидов С.П. – Теория упругости. М.: «Высшая школа», 1979.
6. Пономарев С.Д., Андреева Л.Е. Расчет упругих элементов машин и приборов. М.: Машиностроение, 1980. – 326 с.
Публикации с ключевыми словами: оболочка, гибкий элемент, тонкостенные структуры, нелинейное поведение
Публикации со словами: оболочка, гибкий элемент, тонкостенные структуры, нелинейное поведение
Смотри также:
- 77-30569/240203 Способ редуцирования металлургической порошковой проволоки
- Аналитическое решение контактной задачи об упругих деформациях тонкой пластины, помещенной в цилиндрическую полость
- Расчет фазовых скоростей бегущих волн в цилиндрической оболочке на основе анализа решения краевой задачи о вынужденных колебаниях
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||