научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 08, август 2011
УДК 551.46.07
МГТУ им. Н.Э. Баумана
Введение
Система управления (СУ) движением подводного аппарата (ПА) может быть условно разделена на СУ верхнего уровня, задающую траекторию движения ПА и СУ нижнего уровня, включающую в себя локальные контуры управления – контуры курса, дифферента, крена, лага, марша, глубины, отстояния от дна. В статье анализируются существующие подходы к построению алгоритмов локальных контуров.
Параметры математических моделей, описывающих движение ПА как объекта управления (ОУ), меняются, т.к. они зависят от ряда факторов: скоростей движения ПА, углов наклона. Также на ПА действуют внешние возмущения - течение, реакция кабеля. Поэтому для придания СУ ПА требуемых динамических свойств встает задача построения алгоритмов, слабо чувствительных как к изменению параметров ОУ, так и к действию внешних возмущений. В литературе прослеживаются два направления к построению СУ локальных контуров ПА: первое – на базе классической теории линейных систем автоматического управления, второе – направлено на создание адаптивных регуляторов.
Первое направление требует достаточно точного знания математической модели ОУ. Для синтеза алгоритмов СУ модель линеаризуется, а сам синтез проводится для наихудшего с точки зрения устойчивости случая движения ПА (нахождение аппарата на стопе). Недостатком построенных таким образом алгоритмов является зависимость качества работы СУ от изменения параметров ОУ.
Второе направление активно развивается и также находит применение в СУ ПА. Оно включает в себя совокупность методов синтеза адаптивных и нелинейных регуляторов, слабо чувствительных к внешним возмущениям и изменениям параметров ОУ. Подобные методы синтеза применяются для ОУ, математические модели которых содержат существенные нелинейности, изменчивости параметров, перекрестные связи. К их числу относятся методы с организацией скользящих режимов, различные адаптивные регуляторы, нейросетевые регуляторы, алгоритмы, построенные на основе метода обратных задач динамики.
Далее, по результатам ряда публикаций, применительно к СУ ПА анализируются алгоритмы из данных направлений.
Линейные регуляторы
Линейные регуляторы пользуются популярностью среди разработчиков СУ ПА по двум основным причинам: на данный момент существует большое множество проработанных методик синтеза и простота реализации. Как отмечено выше, расчет коэффициентов линейных регуляторов производится для наихудшего с точки зрения устойчивости случая, что требует точного знания модели объекта и ее параметров. При этом линейная СУ остается чувствительной к изменению параметров ОУ и внешним возмущениям. Для снижения данной чувствительности в СУ вводятся дополнительные внутренние обратные связи (ОС), количество которых ограничено существованием измерителей соответствующих параметров движения ПА.
Для наглядного представления влияния изменения параметров ПА на динамику ОУ, рассмотрим СУ углом курса и покажем отношение синтезируемых коэффициентов СУ для наихудшего и наилучшего с точки зрения устойчивости случая.
Для моделирования и синтеза СУ возьмем упрощенную модель динамики ПА по углу курса:
![]() , (1)
, (1)
![]() , (2)
, (2)
где ![]() ,
, ![]() — момент инерции и присоединенный момент инерции ПА относительно вертикальной оси,
— момент инерции и присоединенный момент инерции ПА относительно вертикальной оси, ![]() — угол курса,
— угол курса, ![]() ,
,![]() — гидродинамические коэффициенты,
— гидродинамические коэффициенты, ![]() — момент, развиваемый движителями, U — напряжение на входе движителей,
— момент, развиваемый движителями, U — напряжение на входе движителей, ![]() ,
, ![]() — постоянная времени и коэффициент усиления движителей.
— постоянная времени и коэффициент усиления движителей.
Упрощенная модель (1) получается из общих уравнений динамики введением следующих допущений:
- ПА находится в плоскости горизонта (углы крена и дифферента равны нулю);
- аппарат не совершает перемещений по линейным координатам;
- аппарат является неудобообтекаемым телом.
После линеаризации уравнение (1) принимает вид
![]() , (3)
, (3)
где
![]() ,
, ![]() , (4)
, (4)
![]() — параметр линеаризации.
— параметр линеаризации.
Анализ частотных характеристик модели (3) показывает, что наихудшим с точки зрения устойчивости случаем является нахождение аппарата на стопе, в то время как движение с максимальной угловой скоростью обеспечивает наибольшие запасы устойчивости. В ходе дальнейшего анализа рассмотрим 3 варианта построения СУ углом курса:
- с обратной связью по положению;
- с обратными связями по положению и скорости;
- с обратными связями по положению, скорости и ускорению.
Синтез коэффициентов будем проводить на основе частотного метода [1] и метода стандартных характеристических полиномов.
СУ углом курса с обратной связью по положению.
Передаточная функция регулятора СУ имеет вид: ![]() , где
, где ![]() — ошибка по углу курса,
— ошибка по углу курса, ![]() — заданный угол курса. В результате синтеза получаем выражения для коэффициентов СУ:
— заданный угол курса. В результате синтеза получаем выражения для коэффициентов СУ:  ,
, ![]() ,
, ![]() , где M – показатель колебательности (принимаем M = 1).
, где M – показатель колебательности (принимаем M = 1).
СУ углом курса с обратными связями по положению и скорости.
Регулятор СУ имеет вид:
![]() . (5)
. (5)
После проведения синтеза получаем соотношения для коэффициентов СУ:
 ,
, , (6)
, (6)
 ,
,![]() , (7)
, (7)
где ![]() ,
, ![]() - коэффициент демпфирования.
- коэффициент демпфирования.
СУ углом курса с обратными связями по положению, скорости и ускорению.
Регулятор СУ имеет вид: ![]() . Выражения для синтезируемых коэффициентов регулятора:
. Выражения для синтезируемых коэффициентов регулятора:
 ,
,  ,
,  ,
,
 ,
, ![]() ,
, ![]() ,
,
где ![]() - время переходного процесса по углу курса.
- время переходного процесса по углу курса.
Проведем расчеты параметров регуляторов для следующих значений параметров ОУ и переходного процесса:
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Значения параметров ОУ соответствуют малогабаритному ПА. Результаты расчетов коэффициентов СУ для двух значений параметров линеаризации ![]() сведены в таблицу.
сведены в таблицу.
Как видно из таблицы с ростом числа внутренних ОС требуемый диапазон подстройки параметров СУ для различных режимов движения ПА уменьшается. Т.е. с увеличением числа внутренних ОС чувствительность СУ к изменению параметров ПА снижается.
Коэффициенты СУ для двух режимов движения ПА
| СУ с позиционной ОС и последовательным КУ | СУ с позиционной и внутренней скоростной ОС | СУ с ОС по координате, скорости и ускорению |
|
|
|
|
|
|
|
|
Отношение параметров СУ для 2-х режимов движения ПА |
|
|
|









Адаптивные регуляторы
Адаптивные регуляторы являются развитием линейных регуляторов. Идея заключается в оценке параметров линеаризованной модели ОУ и последующей подстройке параметров регулятора. В качестве примера рассмотрим адаптивный регулятор на основе СУ с позиционной и скоростной обратными связями (5), реализующий подстройку коэффициентов по законам (6) и (7). Структурная схема СУ показана на рис. 1
|
Рис. 1. Структурная схема адаптивной СУ |

Для сравнения приведем результаты моделирования реакции адаптивной и линейной СУ с двумя обратными связями на ступенчатое воздействие – 80 град. (рис. 2.). Параметры линейной системы рассчитаны для наихудшего с точки зрения устойчивости случая.
|
Рис. 2. Переходные процессы по углу курса в адаптивной (1) и линейной (2) СУ |

Как видно из рис. 2, из-за изменения параметров ОУ переходный процесс в линейной системе затянут в отличие от адаптивной системы, подстраивающей коэффициенты усиления СУ в процессе движения аппарата.
Основные проблемы адаптивных регуляторов вытекают из необходимости знания точной модели ОУ и качества методов оценки её параметров. Кроме того, в адаптивной системе, так же как и в линейной, необходим дополнительный контур для уменьшения влияния внешних возмущений на ПА.
Реализация в СУ скользящего режима
Метод синтеза основан на переключении между различными структурами СУ для обеспечения движения ОУ по прямой скольжения на фазовой плоскости. Благодаря реализации скользящего режима СУ становится слабо чувствительной как к изменению параметров ОУ, так и к внешним возмущениям.
Простейший регулятор, организующий скользящий режим движения, можно описать системой уравнений:
 где
где ![]() , (8)
, (8)
Условие существования скользящего режима в данном случае ![]() . Коэффициент C уравнения линии переключения выбирается таким, чтобы при наихудшем с точки зрения устойчивости случае введение скользящего режима не вызывало автоколебаний в системе.
. Коэффициент C уравнения линии переключения выбирается таким, чтобы при наихудшем с точки зрения устойчивости случае введение скользящего режима не вызывало автоколебаний в системе.
На рис. 3 приведены результаты работы СУ со скользящим режимом при действии на ПА изменяющегося по гармоническому закону внешнего возмущения по моменту (![]() ).
).
|
Рис. 3. Переходный процесс со скользящим режимом |

Практическая реализация данного режима испытывает трудности в связи с ограничениями энергетики движителей и наличием неучтенных при синтезе динамических звеньев в модели ОУ, приводящих к возникновению в СУ колебаний ограниченной частоты.
СУ на основе обратных задач динамики и принципа управления по высшей производной
Идея метода [2] заключается в том, чтобы внутренний контур СУ (по высшей производной) с высоким быстродействием точно воспроизводил воздействие, задаваемое внешними контурами. Тогда динамика всей системы будет определяться внешними контурами, которые будут формировать желаемую модель движения ОУ, т.н. эталонную модель. Несмотря на то, что метод пока не получил широкого распространения при синтезе СУ ПА, он имеет серьезные перспективы благодаря простоте придания СУ свойств слабой чувствительности к изменению параметров ОУ и влиянию возмущений, в частности, перекрестных связей в полной модели динамики ПА. В качестве примера построим СУ для модели ПА (1), (2). В качестве эталонной модели примем дифференциальное уравнение 2-го порядка с астатизмом 1-го порядка: ![]() . Параметры a и b выбираются из требований к времени переходного процесса:
. Параметры a и b выбираются из требований к времени переходного процесса: ![]() ,
, ![]() ,
, ![]() , где
, где ![]() - время переходного процесса. Регулятор данной СУ будет иметь вид:
- время переходного процесса. Регулятор данной СУ будет иметь вид: ![]() , где
, где ![]() - сигнал производной по углу курса, формируемый эталонной моделью. На рис. 4 показана структурная схема СУ с эталонной моделью.
- сигнал производной по углу курса, формируемый эталонной моделью. На рис. 4 показана структурная схема СУ с эталонной моделью.
|
Рис. 4. СУ с эталонной моделью |

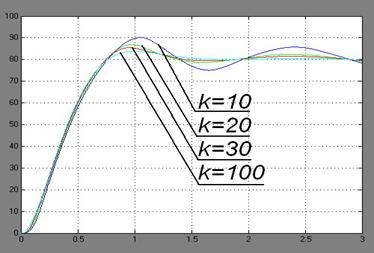
С увеличением значения параметра регулятора k переходный процесс в СУ стремится к эталонному, снижается чувствительность системы к внешним возмущениям. Это проиллюстрировано переходными процессами на рис. 5, где на ПА действовал гармонический возмущающий момент с амплитудой ![]()
|
Рис. 5. Переходный процесс в СУ с эталонной моделью. |
Заключение
На основе представленного анализа можно сделать вывод о целесообразности сосредоточения усилий при разработке СУ ПА на применении методов синтеза, обеспечивающих стабильное качество работы СУ при изменении параметров ПА и влиянии внешних возмущений.
Литература
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. М.: Наука, Гл. ред. физ.-мат. лит., 1975. 768 с.
2. Крутько П.Д. Обратные задачи динамики управляемых систем. Нелинейные модели. М.: Наука, Гл. ред. физ.-мат. лит., 1988. 328 с.
3. Филаретов В.Ф. Устройства и системы управления подводных роботов. М.: Наука, 2005. 270 с.
4. Slotine J.J. Applied nonlinear control. Prentice Hall, 1991. 450 p.
5. Методы классической и современной теории автоматического управления: Учебник в 5-и тт.; 2-е изд., перераб. и доп. Т.3: Синтез регуляторов систем автоматического управления /К.А. Пупков [и др.] М.: Издательство МГТУ им. Н.Э. Баумана, 2004. 616 с.
6. Методы классической и современной теории автоматического управления: Учебник в 5-и тт.; 2-е изд., перераб. и доп. Т.1: Математические модели, динамические характеристики и анализ систем автоматического управления /К.А. Пупков [и др.] М.: Издательство МГТУ им. Н.Э. Баумана, 2004. 656 с.
7. Егоров С.А. Управление движением телеуправляемого подводного аппарата в режиме совместного с носителем движения: Дис. … канд.тех.наук. Москва, МГТУ им. Н.Э. Баумана, 2002. 361 с.
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||