научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 03, март 2011
УДК: 629.7.054.07
ООО «ТеКнол»
dpazychev@mail.ru
Введение
Процедура калибровки бесплатформенной инерциальной навигационной системы любого класса точности подразумевает под собой определение коэффициентов введенной модели ошибок датчиков первичной информации, установленных в системе. Полнота данной модели ошибок базируется на возможности наиболее точного предсказания поведений выходных сигналов датчиков, а также точности оборудования, используемого в процессе калибровки. Чрезмерное усложнение и расширение модели ошибок чувствительных элементов навигационной системы при отсутствии методов их надежного детектирования может не только не увеличить точность навигационной системы в процессе ее эксплуатации, но и наоборот уменьшить.
В данной статье будет описываться методика определения постоянных и неизменных в течение продолжительного периода времени смещений сигналов датчиков угловой скорости, входящих в состав бесплатформенной инерциальной навигационной системы. Оценка указанных смещений будет производиться с использованием традиционного инерциального навигационного алгоритма, в структурную схему которого буду введены корректирующие обратные связи, позволяющие выделить и идентифицировать погрешности датчиков первичной информации.
В статье будет представлена апробация предлагаемого метода для бесплатформенной инерциальной навигационной системы «БИНС-ТЕК», построенной на базе волоконно-оптических датчиков угловой скорости.
Модель ошибок датчиков первичной информации
В общем виде, модель ошибок датчиков первичной информации, используемая в данной работе может быть представлена следующим образом:
| (1) |

где ![]() - абсолютная угловая скорость и кажущееся ускорение системы координат связанной с подвижным носителем соответственно;
- абсолютная угловая скорость и кажущееся ускорение системы координат связанной с подвижным носителем соответственно;
![]() - ошибки в показаниях абсолютной угловой скорости и кажущегося ускорения системы координат связанной с подвижным носителем соответственно;
- ошибки в показаниях абсолютной угловой скорости и кажущегося ускорения системы координат связанной с подвижным носителем соответственно;
 - постоянные смещения нулей датчиков линейного ускорения и угловой скорости соответственно;
- постоянные смещения нулей датчиков линейного ускорения и угловой скорости соответственно;
 - ошибки масштабных коэффициентов датчиков линейного ускорения и угловой скорости соответственно;
- ошибки масштабных коэффициентов датчиков линейного ускорения и угловой скорости соответственно;
 - ошибки перекрестных связей датчиков линейного ускорения и угловой скорости соответственно.
- ошибки перекрестных связей датчиков линейного ускорения и угловой скорости соответственно.
Традиционный метод определения смещений нулей датчиков угловой скорости
Традиционный метод оценивания смещения нулей датчиков угловой скорости бесплатформенной инерциальной навигационной системы базируется на уравнениях ошибок, которые представлены в системе уравнений (2):
| (2) |

где ![]() - ошибки навигационной системы в определении восточной и северной скорости соответственно;
- ошибки навигационной системы в определении восточной и северной скорости соответственно;
![]() - малые углы отклонения расчетного положения навигационной системы координат;
- малые углы отклонения расчетного положения навигационной системы координат;
![]() - ошибки показаний датчиков линейного ускорения в проекции на восточную и северную ось навигационной системы координат соответственно;
- ошибки показаний датчиков линейного ускорения в проекции на восточную и северную ось навигационной системы координат соответственно;
![]() - ошибки показаний датчиков угловой скорости в проекции на восточную и северную ось навигационной системы координат соответственно.
- ошибки показаний датчиков угловой скорости в проекции на восточную и северную ось навигационной системы координат соответственно.
Методика проведения калибровки предполагает установку навигационной системы в плоскость горизонта с указанием продольной оси на север с высокой точностью. После данного расположения производится процедура выставки навигационной системы, по завершению которой система переводится режим навигации, в ходе которого регистрируются ошибки навигационной системы по скорости и курсу. Регистрируемые ошибки представляют собой решение системы уравнений (2) в отсутствии движения системы и постоянства входных возмущений и описываются системой уравнений (3):
| (3) |

где ![]() - матрица направляющих косинусов от связанной с носителем к навигационной системе координат.
- матрица направляющих косинусов от связанной с носителем к навигационной системе координат.
С учетом проведенной ранее процедуры, система уравнений (3) вырождается в систему уравнений (4):
| (4) |

Как видно из полученной системы уравнений (4), ошибки навигационной системы по скоростям представляют собой незатухающие синусоидальные колебания с частотой Шулера, а ошибка навигационной системы по курсу носит еще более сложный характер. Кроме того, следует отметить, что в системе уравнений (4) фигурируют не искомые величины смещений нулей датчиков угловой скорости ![]() , а ошибки показаний датчиков угловой скорости в проекции на оси навигационной системы координат. Это означает, что для расчета величин
, а ошибки показаний датчиков угловой скорости в проекции на оси навигационной системы координат. Это означает, что для расчета величин ![]() необходимо произвести обратный пересчет данных проекций в связанную с носителем систему координат согласно уравнению (5):
необходимо произвести обратный пересчет данных проекций в связанную с носителем систему координат согласно уравнению (5):
| (5) |
Для решения уравнения (5) необходимо знание матрицы направляющих косинусов от навигационной к связанной с носителем системы координат, которая может быть определена следующим образом:
| (6) |
 ,
,где ![]() - углы крена, тангажа и курса навигационной системы соответственно.
- углы крена, тангажа и курса навигационной системы соответственно.
В данном случае матрица направляющих косинусов записана в общем виде, поскольку ошибки углов ориентации могут достигать значительных размеров, что не позволяет воспользоваться ее упрощенной формой.
В случае же использования высокоточных датчиков первичной информации с малыми смещениями нулевого сигнала датчиков угловой скорости углы отклонения расчетного положения навигационной системы координат от ее истинного расположения будут малы и матрица направляющих косинусов может быть записана в следующем виде:
| (7) |

Для данного случая система уравнений (4) с использованием уравнений (5) и (7) будет выглядеть следующим образом:
| (8) |

Как видно из системы уравнений (8), оценка постоянных смещений нулевого сигнала датчиков угловой скорости на основании амплитуд ошибок по скоростям навигационной системы возможна лишь в частном случае.
В общем случае, для оценки постоянных смещений нулевого сигнала датчиков угловой скорости бесплатформенной инерциальной навигационной системы необходимо воспользоваться системой уравнений (4), уравнениями (5) и (6), учитывая при этом углы отклонения рассчитанного положения навигационной системы координат.
Описанный выше традиционный метод оценки весьма сложен, трудоемок и требует накопление данных навигационной системы на продолжительном отрезке времени.
Предлагаемый метод определения смещений нулей датчиков угловой скорости
Предлагаемый метод оценивания смещений нулей датчиков угловой скорости бесплатформенной навигационной системы также базируется на системе уравнений ошибок (2), но предполагает введение дополнительных управляющих угловых скоростей в традиционный алгоритм бесплатформенной инерциальной навигационной системы (рис. 1) с целью уменьшения ее ошибок по скоростям и курсу:
| (9) |


где ![]() - коэффициенты управляющих угловых скоростей.
- коэффициенты управляющих угловых скоростей.
|
Рис. 1. Структурная схема алгоритма бесплатформенной инерциальной навигационной системы с дополнительными управляющими угловыми скоростями. |

Разрешая систему уравнений (9) относительно слагаемых ![]() и
и ![]() можно получить следующую систему уравнений:
можно получить следующую систему уравнений:
| (10) |

Принимая в системе уравнений (10) во внимание, что ![]() ,
, ![]() , а также малость
, а также малость ![]() в установившемся режиме будем иметь следующие зависимости:
в установившемся режиме будем иметь следующие зависимости:
| (11) |

Разрешая систему уравнений (9) относительно слагаемых ![]() можно получить следующие уравнения:
можно получить следующие уравнения:
| (12) |

После завершения переходного процесса будем иметь следующие установившиеся ошибки ориентации рассчитываемого положения навигационной системы координат:
| (13) |

Таким образом, на основании системы уравнений (10), уравнений (11) и (13) можно заключить, что введение дополнительных управляющих угловых скоростей в алгоритм навигационной системы приведет к затухающему колебательному процессу ошибок ориентации рассчитанного положения навигационной системы координат и ошибок навигационной системы по скоростям. На основании малости углов ![]() ,
, ![]() и
и ![]() , а также малого времени введения дополнительных угловых скоростей, матрица направляющих косинусов
, а также малого времени введения дополнительных угловых скоростей, матрица направляющих косинусов ![]() может быть представлена в упрощенной форме (7). Принимая это во внимание, уравнение (11) преобразуется к виду:
может быть представлена в упрощенной форме (7). Принимая это во внимание, уравнение (11) преобразуется к виду:
| (14) |

Таким образом, измеряя амплитуды управляющих угловых скоростей, введенных в алгоритм бесплатформенной инерциальной навигационной системы, возможно напрямую оценивать смещения нулей датчиков угловой скорости. Установившийся режим в уравнении (14), по сути, означает равенство управляющих и связанных угловых скоростей, подаваемых на алгоритм бесплатформенной инерциальной навигационной системы, отражаемое в постоянстве ошибки ее выходного сигнала.
Достоинством предлагаемого метода является возможность изменения времени, необходимого для оценивания смещений нулей датчиков угловой скорости навигационной системы. Действительно, изменяя коэффициенты ![]() ,
, ![]() и
и ![]() , возможно добиваться различной скорости завершения переходных процессов системы уравнений (10) в зависимости от полосы пропускания частот навигационным алгоритмом, выступающим в роли частотного фильтра. При больших значениях коэффициентов
, возможно добиваться различной скорости завершения переходных процессов системы уравнений (10) в зависимости от полосы пропускания частот навигационным алгоритмом, выступающим в роли частотного фильтра. При больших значениях коэффициентов ![]() (рис. 2) получим малое время переходного процесса и широкую полосу пропускания частот, так, что в оцениваемом сигнале будет присутствовать большое количество высокочастотных шумов. Напротив, при малых значениях коэффициентов
(рис. 2) получим малое время переходного процесса и широкую полосу пропускания частот, так, что в оцениваемом сигнале будет присутствовать большое количество высокочастотных шумов. Напротив, при малых значениях коэффициентов ![]() получим большое время переходного процесса, малую полосу пропускания и малое количество шумов в измеряемом сигнале.
получим большое время переходного процесса, малую полосу пропускания и малое количество шумов в измеряемом сигнале.
|
Рис. 2. Математическое моделирование углов ориентации бесплатформенной инерциальной навигационной системы при смещениях нулевого сигнала датчиков угловой скорости порядка |

Чрезмерное уменьшение коэффициентов ![]() ,
, ![]() и
и ![]() приведет к длительному переходному процессу в показаниях навигационной системы по скоростям и их низкочастотному изменению, вызванному нестабильностью смещения нуля датчиков первичной информации. Чрезмерное увеличение коэффициентов
приведет к длительному переходному процессу в показаниях навигационной системы по скоростям и их низкочастотному изменению, вызванному нестабильностью смещения нуля датчиков первичной информации. Чрезмерное увеличение коэффициентов ![]() ,
, ![]() и
и ![]() , напротив, сократит время переходного процесса, но приведет к повышенной дисперсии выходного сигнала по скоростям, вследствие чего определение постоянных смещений нулей датчиков угловых скоростей также будет затруднительным. Таким образом, подбор коэффициентов
, напротив, сократит время переходного процесса, но приведет к повышенной дисперсии выходного сигнала по скоростям, вследствие чего определение постоянных смещений нулей датчиков угловых скоростей также будет затруднительным. Таким образом, подбор коэффициентов ![]() ,
, ![]() и
и ![]() представляет итерационный процесс их изменения для приемлемого соблюдения сразу трех исключающих условий: быстрого времени затухания переходного процесса скоростей навигационной системы, их минимальной зашумленности и стабильности во времени.
представляет итерационный процесс их изменения для приемлемого соблюдения сразу трех исключающих условий: быстрого времени затухания переходного процесса скоростей навигационной системы, их минимальной зашумленности и стабильности во времени.
Предлагаемый в данной статье алгоритм оценки постоянных смещений нулей датчиков угловой скорости по сути представляет собой замену фильтра низких частот, являющегося традиционным навигационным алгоритмом, на фильтр с изменяемой полосой пропускания частот. Кроме того, для указанной оценки не требуется большого количества времени и сохранения большого количества навигационной информации.
Апробация предлагаемого метода
Апробация предлагаемого метода определения смещения нулей датчиков угловой скорости проводилась в процессе заводской калибровки бесплатформенной инерциальной навигационной системы «БИНС-ТЕК» (рис. 3) среднего класса точности (таблица 1), построенной базе отечественных волоконно-оптических гироскопов. Данная навигационная система имеет достаточно большие массово-габаритные показатели (таблица 2) и предназначена для использования на наземных подвижных объектах.
|
Рис. 3. Внешний вид навигационной системы «БИНС-ТЕК» |

Таблица 1
Точностные характеристики инерциальной навигационной системы «БИНС-ТЕК»
Параметр | Режим работы системы | |
Режим коррекции от СНС | Автономный инерциальный режим с коррекцией от одометра | |
Погрешность углов крена и тангажа, 1σ | 0,03…0,08 ° | 0,08…0,1° |
Погрешность угла курса, 1σ | 0,1 ° | 0,5…0,7 ° |
Погрешность путевой скорости, 1σ | 0,1 м/с | 0.3 м/с |
Погрешность вертикальной скорости, 1σ | 0,3 м/с | 0,3…0,5 м/с |
Погрешность координат, 1σ | 5 м | 0,25 % от пройденного пути |
Таблица 2
Технические характеристики инерциальной навигационной системы «БИНС-ТЕК»
Параметр | Значение |
Размеры, мм | 294х200х210 |
Вес, кг | 8 |
Напряжение питания, В | =20...27 |
Потребляемая мощность, Вт | < 15 |
Частота выдачи навигационного решения, Гц | 100 |
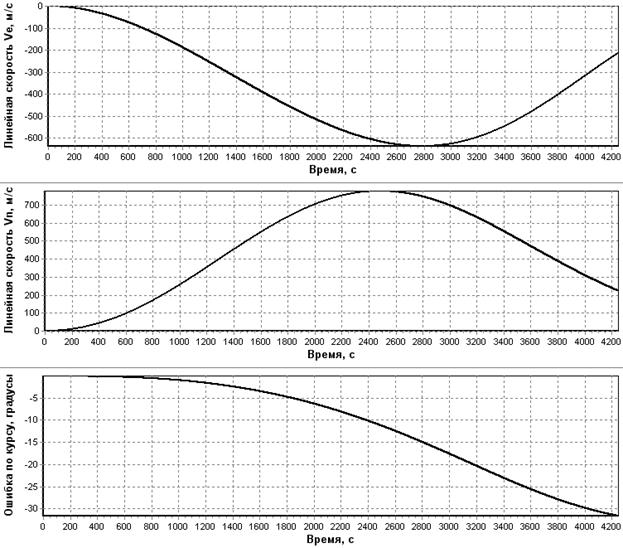
В процессе проведения заводской калибровки навигационная система была установлена в плоскость горизонта. Продольная ось навигационной системы была направлена на север с высокой точностью. Данные, поступающие с навигационной системы, сохранялись на персональный компьютер, подключенный к навигационной системе. Навигационная система находилась в неподвижном состоянии на протяжении 4250 секунд. В процессе проведения заводской калибровки индицировались ошибки навигационной системы по скоростям и курсу (рис. 4).
По завершении процедуры заводской калибровки, сохраненные в ее процессе данные, включающие данные датчиков первичной информации, были обработаны в соответствии с предлагаемой в данной статье методикой.
Так, для проверки работоспособности предлагаемого метода, по сохраненным данным датчиков первичной информации был реализован традиционный алгоритм бесплатформенной инерциальной навигационной системы, в который после процедуры выставки на время 60 секунд были введены дополнительные управляющие угловые скорости (рис. 1) со следующими значениями коэффициентов:
|
|
|
Рис. 4. Ошибки навигационной системы «БИНС-ТЕК» по скоростям и курсу индицируемые в процессе заводской калибровки |
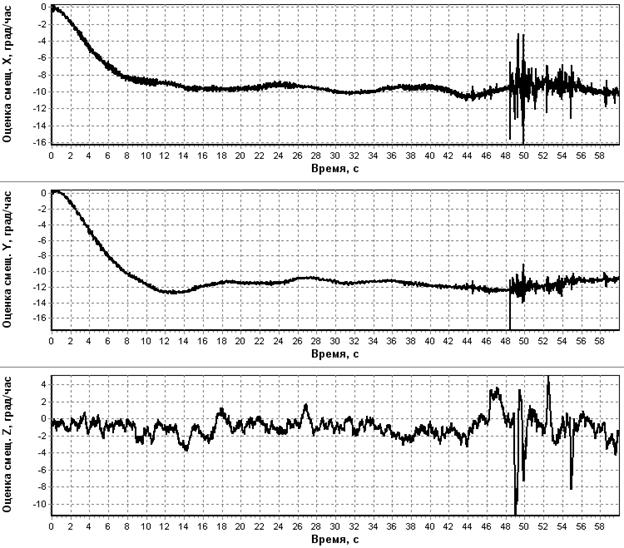
На основании уравнения (14) были построены оценки смещений нулей датчиков угловой скорости навигационной системы (рис. 5), после обработки которых были получены их постоянные значения:
|
| ||
| |||
Рис. 5. Оценки смещения нулей датчиков угловой скорости в процессе калибровки при введении дополнительных управляющих угловых скоростей | |||

Данные значения были введены в паспорт навигационной системы. После этого, с учетом измененного паспорта, по сохраненным ранее данным был реализован традиционный алгоритм бесплатформенной инерциальной навигационной системы без каких-либо коррекций в нем.
Полученные значения ошибок (рис. 6), в сравнении с ранее полученными (рис. 4), подтвердили правильность оцененных смещений нулей датчиков первичной информации и работоспособность предлагаемого в данной статье метода калибровки.
|
Рис. 6. Ошибки навигационной системы после устранения смещений нулей датчиков угловых скоростей |

Заключение
Представленный в данной работе метод оценки смещений нулей датчиков угловой скорости навигационной системы показал свою высокую эффективность в процессе заводской калибровки бесплатформенной инерциальной навигационной системы «БИНС-ТЕК». За время в 60 секунд удалось оценить постоянные составляющие сигналов датчиков угловых скоростей, введение в паспорт которых, дало более чем десятикратное уменьшение ошибок навигационной системы.
Предложенный в данной работе способ прост и нагляден, а также позволяет существенно сократить время заводской калибровки навигационной системы.
Среди недостатков метода можно отметить необходимость настройки параметров вводимых обратных связей ![]() , влияющих на длительность переходного процесса в сигналах оцениваемых смещений нулей датчиков угловой скорости.
, влияющих на длительность переходного процесса в сигналах оцениваемых смещений нулей датчиков угловой скорости.
Список используемой литературы:
1. Технические характеристики инерциальной навигационной системы «БИНС-ТЕК» // Интегрированные навигационные системы – ТеКнол. URL http://teknol.ru/pdf/rus/BINS-TEK_specification_rus.pdf (дата обращения 03.02.2011)
2. Бромберг П.В. Теория инерциальных систем навигации. — М.: Наука ,1979. — 294 с.
3. Salychev O. S. Applied Inertial Navigation: Problems and Solutions. M.: BMSTU Press, 2004. – 304 p
Публикации с ключевыми словами: бесплатформенная инерциальная навигационная система, смещение нулей датчиков угловых скоростей, калибровка навигационной системы
Публикации со словами: бесплатформенная инерциальная навигационная система, смещение нулей датчиков угловых скоростей, калибровка навигационной системы
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||