научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 02, февраль 2011
УДК 621.396.967.029.7
МГТУ им. Н.Э. Баумана
baryshnikov@bmstu.ru
Введение
Методы полунатурного моделирования занимают свою особенную нишу при проектировании сложных систем управления. Обычное понимание роли этих методов сводится к следующему: если математическое моделирование наиболее эффективно на ранних стадиях проектирования, натурное – на заключительных, то полунатурное моделирование связывается с промежуточными стадиями проектирования. Считается, что экспериментальный образец аппаратуры уже готов, но не отлажены алгоритмы обработки сигналов, не исследованы особенности работы аппаратуры во всем диапазоне изменения параметров входного воздействия. Конечно, на этом этапе полунатурные методы моделирования выходят на первый план.
Интересные особенности использования этих методов проявляются при проектировании сложных систем, в частности – высокоточных лазерных оптико-электронных систем. Уже на ранних стадиях проектирования эффективным оказывается включение в состав функциональной схемы полунатурной модели ее критического элемента (например, рабочего лазера). Методологические основы и особенности такого подхода рассматриваются в данной работе.
1.Анализ современного уровня развития методов полунатурного моделирования.
В современной научно-технической литературе достаточно подробно рассмотрены вопросы соотношения различных методов моделирования при проектировании систем. На ранних стадиях проектирования наиболее эффективными являются методы математического моделирования [1,2]. Под ними в технике понимают адекватную замену исследуемой системы или процесса соответствующей математической моделью и ее последующее изучение методами вычислительной математики с привлечением средств современной вычислительной техники. Математическая модель – это описание в виде математических соотношений, устанавливающих связь между параметрами, характеризующими расчетную схему системы [2]. Чтобы ответить на вопросы о системе, которую описывает математическая модель, следует определить, как эту модель построить. Когда модель достаточно проста, можно получить точное аналитическое решение. Однако, многие системы и устройства чрезвычайно сложны, и возможность аналитического решения практически полностью исключается. В этом случае модель следует изучать с помощью имитационного моделирования, т. е. путем многократного ее испытания с различными входными данными, чтобы определить их влияние на показатели оценки работы системы. При этом для получения численных результатов, с помощью которых проводят расчет характеристик исследуемой системы, применяют компьютер. Имитационное моделирование – это процесс создания модели реальной системы и постановки компьютерного эксперимента на этой модели для изучения и прогнозирования ее поведения и в целях улучшения ее характеристик [3].
Отметим, что в современно научно-технической литературе даются различные трактовки определения самого понятия модели, смысл которых, конечно, близок. Так, в [1] под моделью понимают такой материальный или мысленно представляемый объект, который в процессе познания (изучения) замещает объект – оригинал, сохраняя некоторые важные для данного исследования типичные его черты. Процесс построения и использования модели называется моделированием. В [3] модель определяется как представление конкретного объекта или процесса в определенной форме, отличной от реальной.
В отличие от математического, натурное моделирование – это такое моделирование, при котором реальному объекту ставится в соответствие его увеличенный или уменьшенный материальный аналог, допускающий исследование (как правило, в лабораторных условиях) с помощью последующего перенесения свойств изучаемых процессов и явлений с модели на объект на основе теории подобия [1]. К примерам натурных моделей можно отнести макеты в архитектуре, модели судов и самолетов. Конечно, если рассматривать оптико-электронные приборы и системы, то натурное моделирование подразумевает исследование самих разработанных и уже изготовленных приборов на поздних стадиях проектирования.
Полунатурное моделирование представляет собой исследование управляемых систем на моделирующих комплексах с включением в состав модели реальной аппаратуры [4]. Это моделирование с реальной аппаратурой, при котором часть системы моделируется, а остальная часть является реальной. Наряду с реальной аппаратурой в замкнутую модель могут входить имитаторы воздействий и помех, математические модели внешней среды и процессов, для которых неизвестно достаточно точное математическое описание. Включение реальной аппаратуры или реальных систем в контур моделирования сложных процессов позволяет уменьшить априорную неопределенность и исследовать процессы, для которых нет точного математического описания.
В процессе полунатурного моделирования удачно сочетаются достоинства математического и натурного моделирования, и может быть достигнуто оптимальное взаимодействие между вычислительными и натурными экспериментами. В настоящее время методы полунатурного моделирования эффективно применяют при проектировании разнообразных автоматических управляющих систем.
Сделаем некоторые обобщения. Если математическое моделирование наиболее эффективно на ранних стадиях проектирования системы, натурное – на завершающих, то полунатурное моделирование обычно используется на промежуточных стадиях. Действительно, после изготовления разработанного образца аппаратуры, в ряде случаев проведение натурного моделирования затруднено или вообще невозможно. Эти ограничения могут быть связаны с вопросами безопасности, энергопотребления при реализации входного воздействия на разрабатываемую аппаратуру. Кроме того, проведение натурного моделирования может быть просто преждевременным, т.к. алгоритмы управления системой и обработки сигналов еще не отлажены. Именно в этом случае на первый план выходят методы полунатурного моделирования.
На рис.1 показана исследуемая система, включающая аппаратуру, на которую оказывается внешнее воздействие. Материальный источник воздействия характеризуется параметрами ![]()
При полунатурном моделировании часть исследуемой системы является реальной (исследуемая аппаратура), а часть – моделируется, т. е. заменяется на ее физическую модель. Как правило, моделируется именно входное воздействие. Материальный источник воздействия заменяется на его физический аналог, использование которого более безопасно, менее энергоемкое, экономически выгодно и т. д.. Параметры ![]() необходимо будет при моделировании изменить (для обеспечения безопасности, снижения энергопотребления, и т. д.), а параметры
необходимо будет при моделировании изменить (для обеспечения безопасности, снижения энергопотребления, и т. д.), а параметры ![]() должны сохранять свои значения для адекватности проводимых исследований.
должны сохранять свои значения для адекватности проводимых исследований.
|
Рис.1. Структурная схема исследуемой системы |

Полунатурная модель части системы будет характеризоваться параметрами ![]() , а модельные соотношения будут выглядеть следующим образом:
, а модельные соотношения будут выглядеть следующим образом:
![]() (1)
(1)
Полунатурное моделирование предполагает организацию некоторого управляющего воздействия ![]() на сам физический аналог, обеспечивая управление его параметрами
на сам физический аналог, обеспечивая управление его параметрами ![]() . Выбор параметров этого управляющего воздействия позволяет исследовать различные режимы работы аппаратуры во всем диапазоне изменений параметров
. Выбор параметров этого управляющего воздействия позволяет исследовать различные режимы работы аппаратуры во всем диапазоне изменений параметров ![]() . Такая структура определяет эффективное использование полунатурного моделирования на поздних стадиях проектирования сложных систем, когда сама система уже изготовлена, а отлаживаются алгоритмы ее работы с учетом моделирования внешнего воздействия.
. Такая структура определяет эффективное использование полунатурного моделирования на поздних стадиях проектирования сложных систем, когда сама система уже изготовлена, а отлаживаются алгоритмы ее работы с учетом моделирования внешнего воздействия.
Структурная схема такого подхода к использованию метода полунатурного моделирования показана на рис.2. Она включает, как правило, физическую модель моделируемой части системы, компьютерную модель генератора внешнего управляющего воздействия, устройство сопряжения с исследуемой аппаратурой, саму исследуемую аппаратуру, систему вывода и отображения информации. Генератор внешнего управляющего воздействия формирует сигналы управления ![]() параметрами
параметрами ![]() физической модели, которые представляют интерес при моделировании и должны соответствовать реальному воздействию на аппаратуру. В результате на выходе формируется внешнее воздействие с параметрами
физической модели, которые представляют интерес при моделировании и должны соответствовать реальному воздействию на аппаратуру. В результате на выходе формируется внешнее воздействие с параметрами ![]()
Важно отметить, что моделироваться может не только некоторое внешнее воздействие на исследуемую аппаратуру, но и некоторые критические элементы самой аппаратуры, использование которых на рассматриваемой стадии проектирования ограничено рядом причин. Так, например, при проектировании оптико-электронных систем, работающих с высокоэнергетическим лазерным источником, применение полунатурных методов особенно актуально и даже необходимо. Возможность использования мощного лазерного источника на стадии отладки алгоритма управления системой практически всегда ограничена. Безопасность персонала, высокое энергопотребление, ограниченный ресурс работы элементов оптических систем, преобразующих излучение лазера – вот основные объективные причины, которые заставляют разработчика обратиться к моделированию воздействия излучения высокоэнергетического лазера на систему.
|
Рис. 2. Структурная схема полунатурной модели исследуемой системы |

Можно отметить, что моделирование некоторого внешнего воздействия на аппаратуру, или некоторых составных частей аппаратуры, использование которых ограничено по ряду причин, является примером применения методов полунатурного моделирования при проектировании сложных систем на стадии отладки алгоритмов управления и обработки данных.
Особое значение приобретают методы полунатурного моделирования при проектировании высокоточных оптико-электронных систем управления, работающих в динамическом режиме. Исследование реальных точностных характеристик разрабатываемой системы во всем диапазоне возможных изменений параметров внешнего воздействия и разработка на этой основе оптимальных алгоритмов управления и обработки данных – все это возможно только с использованием стендов полунатурного моделирования.
Итак, особенностью полунатурных методов моделирования является возможность подробного исследования режимов работы системы. С помощью модели генератора внешнего управляющего воздействия и физической модели критического элемента эти режимы могут быть исследованы во всем диапазоне возможных изменений части параметров внешнего воздействия, чего не всегда можно достичь натурными экспериментами.
Кроме того, именно полунатурное моделирование позволяет исключить неопределенность, проявляющуюся при имитационном моделировании, в связи с невозможностью точного математического описания работы системы.
Таким образом, использование полунатурных методов моделирования при проектировании современных систем управления имеет важное самостоятельное значение.
2. Разработка основных принципов использования методов полунатурного моделирования при проектировании современных лазерных оптико-электронных систем
В настоящее время активно развиваются оптико-электронные системы, использующие лазерное излучение высокой мощности. К этим системам относятся лазерные технологические установки для резки, сварки, обработки поверхностей различных материалов, лазерные локационные станции, научно-исследовательские установки для изучения взаимодействия лазерного излучения с веществом и т. д.. Несмотря на различное назначение, эти системы объединяет то, что излучение их рабочего лазера (РЛ) отличается значительной мощностью. Уже сам по себе этот факт позволяет рассматривать РЛ как критический элемент системы. Тем самым определяется объективная необходимость использования полунатурных методов моделирования на поздних стадиях их проектирования, о чем говорилось в предыдущем разделе.
Конечно, стоит отметить, что это достаточно традиционное направление использования полунатурных методов моделирования при проектировании систем.
Одним из перспективных направлений разработки лазерных оптико-электронных систем является использование методов и принципов полунатурного моделирования уже на стадии формирования структурной и функциональной схем аппаратуры. Такое направление представляется достаточно оригинальным именно при проектировании сложных систем, использующих мощные РЛ.
При синтезе структурной и функциональной схем аппаратуры следует обеспечить решение главной задачи каждой из перечисленных выше лазерных систем - формирование излучения РЛ с заданной пространственной структурой и в заданных координатах пространства. Эту задачу можно рассматривать как задачу первого уровня, которая определяется назначением разрабатываемой системы.
Вместе с тем, для ее обеспечения, как правило, необходимо решить ряд задач дополнительных, или вспомогательных задач. Это задачи второго уровня. Они могут быть связаны с юстировками, калибровками системы, проведением профилактических работ и т. д.. Для некоторых систем такие задачи решаются с использованием дополнительной аппаратуры. Но для целого ряда систем они должны решаться в процессе ее работы и более того, их решение обеспечивает качество решения основной задачи, т. е. задачи первого уровня.
В том случае, если для решения задачи второго уровня должен быть использован критический элемент системы, возникает объективная необходимость включения в функциональную схему его полунатурной модели.
Наиболее характерным примером такой ситуации является системы современных высокоточных лазерных локационных станций (ЛЛС), предназначенных для передачи энергии лазерного излучения на значительные расстояния. К таким системам предъявляются высокие требования по точности наведения оси диаграммы направленности лазерного излучения на исследуемый объект. Погрешности наведения должны составлять не более нескольких угловых секунд. Как правило, такие системы характеризуются:
- высокой энергетикой используемого РЛ;
- высокой направленностью сформированного в передающем канале излучения РЛ;
- значительными габаритами приемо-передающих каналов;
- работой в условиях внешних возмущающих воздействий – механических вибраций, температурных перепадов;
- собственными уводами оси диаграммы направленности излучения РЛ.
Достижение погрешностей наведения в несколько угловых секунд – сложная научно-техническая задача. Решение ее подразумевает решение целого ряда задач второго уровня, к которым в первую очередь относится задача обеспечения высокой соосности приемной и передающей систем ЛЛС. Решить эту задачу с учетом условий работы чисто конструктивными методами или с использованием периодических юстировок каналов не представляется возможным.
Известным методом обеспечения соосности каналов многоканальных оптических систем, работающих в сложных условиях внешних воздействий, является использование систем автоюстировки [5].
Задача системы автоюстировки - измерение и отработка в автоматическом режиме углового рассогласования между осью диаграммы направленности излучения РЛ, сформированного передающим каналом ЛЛС, с осью приемного канала системы.
Эта задача наилучшим образом может быть решена прямыми измерениями. Для этого часть излучения РЛ, несущего информацию о пространственном положении оси его диаграммы направленности, должна быть направлена с выхода передающего канала в приемный канал, где тем или иным образом и будет измерено угловое рассогласование. Однако попытки реализации таких измерений наталкиваются на значительные технические проблемы, связанные с высокой энергетикой излучения РЛ, габаритами системы отвода, адекватностью регистрируемой информации о пространственном положении оси диаграммы направленности излучения РЛ, частотным режимом его работы и т. д..
Все это говорит о том, что попытки использования для построения систем автоюстировки излучения РЛ влечет за собой значительные проблемы технологического, конструктивного и схемного уровня, при этом задача автоюстировки в полном объеме не может быть решена.
Именно в этом случае использование методов полунатурного моделирования позволяет успешно решить задачу автоюстировки. Принцип такого подхода для рассматриваемой системы следующий: Система дополняется полунатурной моделью РЛ – дополнительным лазерным источником – маркерным излучателем (МИ). Ось диаграммы направленности излучения МИ совмещают с осью диаграммы направленности излучения РЛ с высокой точностью. Все остальные характеристики МИ (длина волны излучения, пространственные и энергетические характеристики, частотный режим генерации) определяются разработчиком в интересах обеспечения условий уверенной работы системы автоюстировки. Далее, в системе автоюстировки излучение этого МИ является репером пространственного положения оси диаграммы направленности излучения РЛ.
Такой принцип позволяет решить задачу автоюстировки, обеспечивая:
- требуемый частотный режим работы системы;
- выбор длины волны излучения МИ, удобный для эксплуатации;
- использование источника с мощностью излучения, не вызывающей проблем при проектировании и эксплуатации системы; и т. д.
Этот принцип использования методов полунатурного моделирования на ранних стадиях проектирования систем имеет общий характер. На рис.3 приведена структурная схема системы, построенной с использованием полунатурной модели ее критического элемента.
|
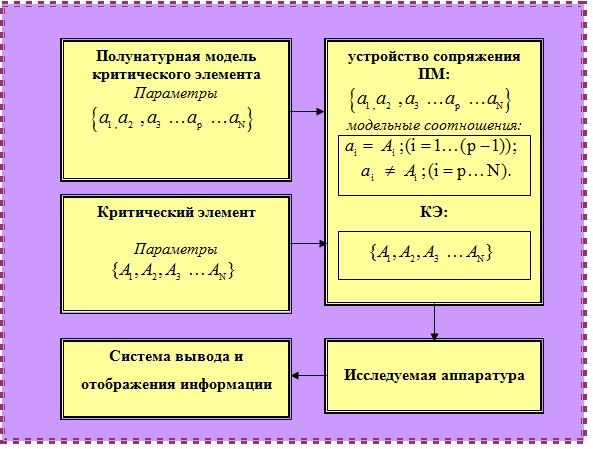
Рис.3. Структурная схема системы с полунатурной моделью критического элемента
Если в системе имеется критический элемент, устройство, узел, параметры которого не позволяют решить задачу второго и следующих уровней в полном объеме, то система дополняется полунатурной моделью этого критического элемента. Как любая модель, вводимая в нашем случае модель должна иметь некоторые параметры ![]() . Часть этих параметров
. Часть этих параметров ![]() должны соответствовать значению параметров
должны соответствовать значению параметров ![]() критического элемента, а другие параметры
критического элемента, а другие параметры ![]() – ее собственные параметры, которые устанавливаются разработчиком для решения задачи второго и следующего уровней при проектировании.
– ее собственные параметры, которые устанавливаются разработчиком для решения задачи второго и следующего уровней при проектировании.
Итак, полунатурная модель будет характеризоваться параметрами ![]() , а модельные соотношения будут выглядеть следующим образом:
, а модельные соотношения будут выглядеть следующим образом:
![]() (2)
(2)
Введение в разрабатываемую систему полунатурной модели элемента осуществляется через систему сопряжения.
Устройство сопряжения решает две задачи. Во-первых, оно должна привести параметры ![]() модели в соответствии с параметрами
модели в соответствии с параметрами ![]() критического элемента. Во-вторых, она должна связать и критический элемент, и его полунатурную модель с остальной частью проектируемой системой.
критического элемента. Во-вторых, она должна связать и критический элемент, и его полунатурную модель с остальной частью проектируемой системой.
И, наконец, важно отметить, что если в системе присутствует критический элемент, то при проведении полунатурного моделирования системы с целью отладки алгоритмов управления и обработки данных, именно его необходимо заменить физической моделью, о чем говорилось выше. На рис.4 приведена структурная схема системы, построенной и с использованием методов полунатурного моделирования ее критического элемента, и с моделированием его воздействия на саму систему.
Таким образом, методы полунатурного моделирования при проектировании сложных систем могут быть использованы:
- при разработке структурной и функциональной схем системы – с целью обеспечения решения задач 2-го и т.д. уровней;
- на заключительных стадиях проектирования системы, при создании комплексов экспериментальной аппаратуры – с целью отладки алгоритмов обработки сигналов и управления системой.
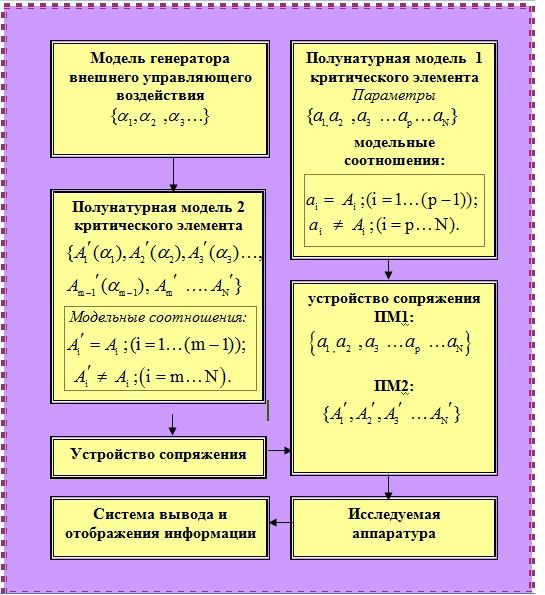
Рис.4.Структурная схема полунатурной модели исследуемой системы с полунатурной моделью критического элемента
Рассмотрим использование методов полунатурного моделирования на примере проектирования высокоточной лазерной локационной станции с системой автоюстировки осей приемо-передающих каналов.
Функциональная схема ЛЛС показана на рис.5. Пучок излучения РЛ 1 может иметь рабочую длину волны излучения в среднем (3-5 мкм) или дальнем (8-14 мкм) ИК диапазоне спектра. Сечение его пучка имеет форму кольца с внутренним и внешним диаметрами ![]() . С помощью системы управляемых зеркал 2 излучение РЛ направляется в формирующий телескоп 3 передающего канала. Приемный канал ЛЛС включает приемный объектив 4 и матричное ФПУ5. Формирующий телескоп передающего канала совместно с приемным каналом установлен в опорно-поворотном устройстве 6.
. С помощью системы управляемых зеркал 2 излучение РЛ направляется в формирующий телескоп 3 передающего канала. Приемный канал ЛЛС включает приемный объектив 4 и матричное ФПУ5. Формирующий телескоп передающего канала совместно с приемным каналом установлен в опорно-поворотном устройстве 6.
Для обеспечения режима автоюстировки в функциональную схему ЛЛС включается полунатурная модель критического элемента системы – рабочего лазера. Это – маркерный излучатель 7. Его излучение преобразуется формирующей оптической системой (ОС) 8, проходит дефлектор 9 и вводится в ОС передающего канала ЛЛС с помощью пентапризмы 10. Излучение МИ рационально вводить по оси передающего канала, пользуясь кольцевой формой сечения пучка РЛ.

Рис.5. Функциональная схема лазерной локационной станции с системой автоюстировки
Устройство сопряжения должно обеспечить выполнение модельного соотношения (2) (см. рис.3). Для разрабатываемой системы его можно сформулировать следующим образом: Направляющие косинусы оси диаграмм направленности пучков излучения РЛ ![]() и МИ
и МИ ![]() должны быть равны, т.е.
должны быть равны, т.е.
![]() . (3)
. (3)
Остальные параметры маркерного излучателя – рабочая длина волны, мощность излучения, диаметр сечения пучка, режим генерации излучения и т.д. – определяется разработчиком, исходя из требований к формированию оптической схемы САЮ. Рабочую длину волны рационально выбрать в видимом диапазоне спектра. Мощность излучения составляет несколько мВт. Диаметр сечения пучка определяется из оптимальной компоновки системы и в зависимости от значений ![]() . Режим генерации – непрерывный или квазинепрерывный, с частотой генерации несколько кГц, что гарантированно обеспечит требуемый частотный диапазон работы САЮ.
. Режим генерации – непрерывный или квазинепрерывный, с частотой генерации несколько кГц, что гарантированно обеспечит требуемый частотный диапазон работы САЮ.
Устройство сопряжения включает плоскопараллельную пластину 11, отводящую незначительную часть излучения РЛ и МИ. Отведенное излучение РЛ направляется в зеркальный объектив 12,13 и после светоделителя 15 регистрируется на матричном ИК фотоприемном устройстве (ФПУ) 16, установленном в фокальной плоскости зеркального объектива. Отведенное излучение МИ через ромб призму 14 направляется в тот же зеркальный объектив 12,13, проходит светоделитель 15 и регистрируется на матричном ФПУ 17 видимого диапазона спектра, также установленном в фокальной плоскости зеркального объектива.
Микропроцессорная системы 18 обеспечивает измерение угловых координат зарегистрированных пятен излучения РЛ и МИ, определяет их угловое рассогласование и формирует управляющий сигнал на дефлектор 9, который и отрабатывает измеренное рассогласование.
Пучок излучения МИ после прохождения плоскопараллельной пластины 11 последовательно проходит вместе с пучком РЛ одни и те же оптические компоненты передающего канала. В этом случае на выходе формирующего телескопа 3 передающего канала пучок излучения МИ распространяется параллельно с пучком излучения РЛ, сформированным передающим каналом ЛЛС.
С выхода формирующего телескопа пучок излучения МИ с помощью призменного мостика 19 направляется в приемный канал ЛЛС. В приемном канале пучок МИ должен быть репером пространственного положения оси диаграммы направленности излучения РЛ, сформированного передающим каналом ЛЛС. Для этого призменный мостик 19 должен отражать падающий на него пучок излучение МИ точно в обратном направлении. Матрица МПМ его действия должна иметь следующий вид:

Такой матрицей отражения описывается действие идеального уголкового отражателя [УО] или уголкового отражателя с дополнительными ромб призмами, как это показано на рис.5.
После разработки конструкции и изготовления действующего образца устройства сопряжения САЮ, в НИИ радиоэлектроники и лазерной техники МГТУ им. Н.Э. Баумана был разработан экспериментальный стенд для полунатурного моделирования режимов ее работы с целью отладки алгоритмов обработки информации. Стенд разработан в соответствии со структурной схемой рис.4. Сам РЛ заменяется его полунатурной моделью 2, а моделирование углового положения оси диаграммы направленности его излучения осуществляется системой ввода углового возмущения, управляемой компьютером. Функциональная схема установки показана на рис.6.
Моделируемая часть системы включает полунатурную модель 2 РЛ, которой является He-Ne лазер типа ЛГ - 118, с рабочей длиной волны 3,39 мкм, лежащей в среднем

Рис. 6. Функциональная схема экспериментальной установки для полунатурного моделирования режимов работы системы автоюстировки
ИК диапазоне спектра. Оптическая система сопряжения обеспечивает выполнение модельных соотношений (1). Для разработанного стенда их можно сформулировать следующим образом: диаметры сечения пучка РЛ и его полунатурной модели должны быть равны, диапазон возможных значений направляющих косинусов оси диаграмм направленности пучков излучения РЛ ![]() и его полунатурной модели 2
и его полунатурной модели 2 ![]() должны быть равны, т.е.
должны быть равны, т.е.
![]() .
.
Генератор внешнего управляющего воздействия включает управляемый программой с персонального компьютера шаговый привод, который в свою очередь управляет поворотными зеркалами. Такая система позволяет моделировать угловое положение оси диаграммы направленности излучения РЛ в динамическом режиме.
Излучение направляется на оптическую систему сопряжения – зеркальный телескоп соосно излучению МИ, часть его отражается на плоскопараллельной пластине в зеркальный объектив устройства сопряжения, а основная часть проходит эту пластину и регистрируется на оптико-электронном координаторе системы вывода и отображения информации. Персональный компьютер протоколирует результаты работы всех трех координаторов, и выводит изображения взаимного положения пучков излучения на мониторы.
Внешний вид экспериментального стенда его показан на рис.7. Полунатурная модель 2 РЛ с оптической системой сопряжения показана на рис.8. В качестве устройства ввода углового возмущения в оптический канал формирования излучения ЛИ в экспериментальной стенде используется два плоских зеркала, установленных каждый на валу своего шагового двигателя и во взаимно ортогональных плоскостях. Эта система устанавливается на выходе ЛИ.
Рис.7. Внешний вид экспериментального стенда | |
Рис.8. Полунатурная модель 2 РЛ с оптической системой сопряжения | |


Шаговые двигатели управляются с персонального компьютера. Разработанное программное обеспечение позволяет вводить угловое возмущение, как случайным образом, так и по заданной траектории в пределах заданных углов отклонения.
Основные технические характеристики экспериментального стенда приведены в Таблице 1.
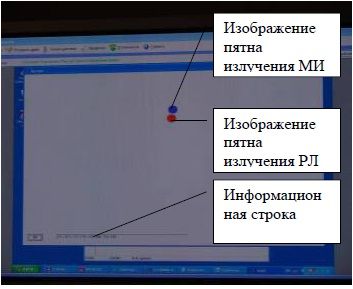
Система индикации включает три монитора (монитор координатора МИ и монитор координатора РЛ, монитор координатора системы измерения рассогласования, по рис.6), на которые выводится изображение зарегистрированных на устройстве сопряжения пятен излучения МИ и РЛ.
Таблица 1
Технические характеристики экспериментального стенда для полунатурного моделирования режимов работы системы автоюстировки
╧ | Наименование | Значение |
1 | Рабочая длина волны излучения полунатурной модели рабочего лазера, мкм | 0,63; 1,15; 3,39 |
2 | Диаметры кольцевого сечения пучка излучения модели рабочего лазера, | 150; 60 |
3 | Видимое увеличение телескопа оптической системы сопряжения, | 1/60 |
4 | Максимальное угловое смещение, угл. мин. | 4 |
5 | Шаг по угловому смещению оси пучка излучения модели рабочего лазера , угл. с | 1 |
6 | Максимальная частота ввода углового возмущения, кГц. | 1 |
Вид зарегистрированных пятен показан на рис.9 и 10. На третий монитор выводится имитационная картина динамического процесса союстировки осей (см. рис.11). На информационной строке внешнего дисплея выводится параметры текущей информации - ![]() ,
, ![]() ,
, ![]() .
.
Рис.10. Изображение пятна излучения модели рабочего лазера |
|
Рис.11. Информационная картина динамического процесса союстировки |

На стенде проведен цикл экспериментальных исследований среднеквадратической погрешности измерений угловых координат зарегистрированных пятен излучения МИ и модели РЛ, а также среднеквадратической погрешности отработки углового рассогласования осей МИ и модели РЛ в статическом и динамическом режимах.
Для вычисления погрешностей используются данные координатной информации, регистрируемые в реальном времени в персональном компьютере.Полученные результаты приведены в Таблице 2.
Таблица 2
Результаты исследования точностных характеристик системы автоюстировки на экспериментальном стенде
╧ | Наименование | Значение |
1 | Среднеквадратическое значение погрешности измерения углового рассогласования осей пучков излучения РЛ и МИ в статическом режиме, в условиях действия остаточных вибраций и флуктуаций собственных осей лазерных излучателей | 5 |
2 | Среднеквадратическое значение погрешности отработки углового рассогласования осей пучков излучения РЛ и МИ в динамическом режиме, в условиях действия остаточных вибраций и флуктуаций собственных осей лазерных излучателей. Максимальное угловое смещение – 30 угл. с, частота ввода углового смещения –до 10 Гц. | 10 |
Выводы
При проектировании сложных лазерных оптико-электронных систем методы полунатурного моделирования эффективно использовать не только при отладке алгоритмов обработки сигналов на поздних стадиях проектирования системы и при экспериментальном исследовании ее характеристик во всем диапазоне изменения параметров внешнего воздействия, но также при разработке функциональной схемы системы.
Литература
1. Введение в математическое моделирование: Учеб. пособие /Под ред.П.В.Трусова.-М.: Логос,2004. – 440с.
2. Зарубин В.С. Математическое моделирование в технике: Учеб. Для вузов / Под ред. В.С. Зарубина, А.П. Крищенко.- М.: Изд-во МГТУ им. Н.Э. Баумана, 2001.-496с. (Сер. Математика в техническом университете; Вып. ХХI, заключительный).
3. Строгалев В.П., Толкачева И.О. Имитационное моделирование: Учеб. пособие. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. – 280с.: ил.
- Математическое моделирование систем связи : учебное пособие / К. К. Васильев, М. Н. Служивый. – Ульяновск : УлГТУ, 2008. – 170 с.
- Н.В.Барышников В.В.Карачунский, В.И.Козинцев, А.С.Румянцев, Д.В.Худяков Использование методов полунатурного моделирования для исследования характеристик системы автоюстировки Тезисы докладов IV НТК «Радиооптические технологии в приборостроении», Сочи, 2006 г., с. 105 – 108.
Публикации с ключевыми словами: полунатурное моделирование
Публикации со словами: полунатурное моделирование
Смотри также:
- Проектирование стенда имитационного моделирования на основе платформы Гью-Стюарта
- Управление поворотом полезной нагрузки робота для движения по трубопроводам малых диаметров
- 77-30569/230123 Особенности разработки модульных аппаратно-программных комплексов полунатурного моделирования систем управления и навигации малоразмерных космических аппаратов
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||