научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 04, апрель 2010
УДК 621.81, 621.8.03.
НПО им.С.А.Лавочкина, МГТУ им. Н.Э.Баумана.
victorfa@mail.ru
В момент посадки КА может иметь как вертикальную, так и горизонтальную составляющие скорости, величины которых лежат в пределах от нескольких единиц до нескольких десятков метров в секунду. Для обеспечения нормального функционирования аппарата необходимо погасить его кинетическую энергию с допустимыми перегрузками при посадке и обеспечить вполне ориентированное положение на поверхности.
Энергия аппарата при ударе в основном воспринимается посадочным устройством (ПУ), часть энергии затрачивается на деформацию грунта и несущей конструкции аппарата, небольшая часть переходит в тепловую энергию.
Так как конструкция аппарата не должна разрушаться при посадке, то при определении сил, действующих на аппарат в процессе посадки, будем исходить из предположения, что аппарат является абсолютно жестким телом и посадка происходит на твердый грунт, а вся энергия аппарата при ударе поглощается энергопоглотителями ПУ. При таком допущении перегрузка в ![]() центре масс аппарата получится несколько завышенной, что пойдет в запас прочности конструкции, но существенно упростится задача при выборе характеристик амортизации.
центре масс аппарата получится несколько завышенной, что пойдет в запас прочности конструкции, но существенно упростится задача при выборе характеристик амортизации.
В качестве энергопоглотителей для ПУ КА используются материалы, обладающие высокой пластичностью: пенопласты, соты, тонкостенные сминаемые оболочки, стержни из пластичной стали. Они отличаются величиной максимальной относительной деформации, максимальным усилием при обжатии, формой диаграммы обжатия, энергией упругой отдачи при снятии внешней нагрузки.
Основной характеристикой энергопоглотителей является диаграмма обжатия, т.е. изменение усилия F по ходу h при деформации энергопоглотителя, которая определяется экспериментально. Площадь под кривой диаграммы представляет собой работу затраченную на его обжатие. Отношение площади под кривой диаграммы к площади прямоугольника со сторонами
![]() (максимальное усилие обжатия) и
(максимальное усилие обжатия) и ![]() (максимальная деформация) называется коэффициентом полноты диаграммы обжатия
(максимальная деформация) называется коэффициентом полноты диаграммы обжатия ![]() . Чем выше коэффициент полноты
. Чем выше коэффициент полноты ![]() , тем меньше нагрузки на аппарат при одинаковой деформации энергопоглотителей.
, тем меньше нагрузки на аппарат при одинаковой деформации энергопоглотителей.
При снятии нагрузки энергопоглотитель упруго разгружается. Отношение энергии упругой отдачи к энергии поглощенной при обжатии называется коэффициентом упругой отдачи. Чем меньше упругая энергия, тем более устойчив аппарат к опрокидыванию при посадке.
Рассмотрим характеристики некоторых энергопоглотителей и их использование для амортизации аппарата при посадке.
Пенопласты. Известно много марок пенопластов. В качестве энергопоглотителей могут использоваться различные вспененные материалы – пенопласты, такие как пенополистирол (ППС), пенополиуретан (ППУ), пенополиэтилен (ППЭ) и другие. Структура пенопластов представляет собой отвердевшую пену, образующую систему изолированных и связанных между собой ячеек, заполненных газом. Содержание газовой фазы в пенопластах может составлять до 90% объема материала, т.е. во много раз превышать содержание твердой полимерной фазы. Этим и объясняется их малая плотность по сравнению с плотностью соответствующих монолитных пластмасс.
Пенопласты различаются по плотности, жесткости, диапазону рабочих температур и другими механическими и теплофизическими свойствами. Разрушающее напряжение при сжатии существенно зависит от плотности материала.
Пенопласты хорошо поддаются механической обработке, хорошо склеиваются, обладают высокой адгезией к различным металлам и неметаллам.
Использованию пенопластов для всенаправленной амортизации способствует их высокая технологичность нанесения на поверхности аппаратов сложной конфигурации, обеспечивающая тем самым равномерно распределенную нагрузку при ударе.
На рис.1 показаны диаграммы обжатия некоторых пенопластов.
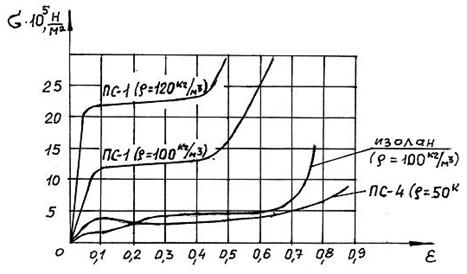
Рис.1. Диаграммы обжатия пенопластов.
Начало нагрузочной кривой соответствует участку упругой деформации, на котором после снятия нагрузки материал восстанавливается под действием сил упругости, возникающих при искривлении стенок ячеек. Затем идет участок текучести, на котором деформация растет при малом увеличении нагрузки. Обычно, при выборе толщины пенопласта, потребной для амортизации, принимают, что относительная деформация ε не превышает определенного значения, начиная с которого резко увеличивается напряжение сжатия.
Коэффициент полноты диаграммы обжатия η для пенопластов приблизительно равен 0,7. Коэффициент упругой отдачи составляет k ≈ 0,1.
Работа, затраченная на обжатие пенопласта
А =![]() , (1)
, (1)
где ![]() - максимальный ход при амортизации,
- максимальный ход при амортизации,
![]() - максимальное усилие при обжатии.
- максимальное усилие при обжатии.
Кинетическая энергия аппарата в момент контакта его с поверхностью посадки равна
![]() ,
,
где m – масса аппарата, V – скорость его посадки.
Изменение потенциальной энергии за время торможения
П = ![]() ,
,
где ![]() - ускорение силы тяжести планеты.
- ускорение силы тяжести планеты.
Величина максимальной силы при посадке ограничивается допускаемой перегрузкой
![]() , (4 )
, (4 )
где ![]() - ускорение силы тяжести на Земле.
- ускорение силы тяжести на Земле.
Тогда из условия равенства энергии аппарата работе амортизации энергопоглотителя можно найти максимальный ход амортизатора ![]()
![]() . (5)
. (5)
Зная ход амортизатора ![]() и относительную деформацию ε, можно найти необходимую толщину пенопласта
и относительную деформацию ε, можно найти необходимую толщину пенопласта![]() .
.![]()
Потребная жесткостная характеристика пенопласта равна
![]() , (6 )
, (6 )
где ![]() - площадь контакта аппарата с поверхностью посадки.
- площадь контакта аппарата с поверхностью посадки.
При большом ходе амортизации и значительном изменении площади контакта, можно использовать пенопласты с разной жесткостью.
На рис.2 показано сечение посадочного аппарата « Марс -3,6»

Рис.2 Посадочный аппарат «Марс -3,-6».
1,2 – пенопласт, 3 – кожух из стеклотекстолита.
Соты. Соты, обладая высокой удельной жесткостью и прочностью, широко используются в качестве заполнителя в трехслойных панелях. Кроме того, соты используются в качестве теплозащиты и амортизации спускаемых аппаратов.
Геометрически соты характеризуются формой ячейки соты: а – размером сторон, ![]() - толщиной фольги. Наиболее распространенной формой ячейки являются шестигранные соты. Иногда применяются соты квадратной формы, а также вытянутой шестигранной формы.
- толщиной фольги. Наиболее распространенной формой ячейки являются шестигранные соты. Иногда применяются соты квадратной формы, а также вытянутой шестигранной формы.
Металлические соты изготавливают из предварительно гофрированной фольги с последующей пайкой, сваркой или склеиванием. Для изготовления сот используются: алюминиевомагниевый сплав АМГ2-Н, титановый сплав ВТ15, нержавеющая сталь 12Х18Н10Т и другие материалы с толщиной фольги от 0,03мм до 0,15мм.
Сотовые блоки изготавливают с размером ячейки шестигранника 2,5; 4; 5 и 6мм.Толщина фольги, материал, форма и размер ячейки определяются из условия обеспечения необходимой прочности и жесткости.
Соты изготавливают также из хлопчатобумажной и стеклянной тканей, бумаги с последующей пропиткой различными смолами.
На величину несущей способности металлических сот влияет способ их изготовления. При прочих равных условиях наибольшей прочностью обладают соты с проклеенной или пропаянной двойной гранью. Сварные сотоблоки, полученные точечной или роликовой электросваркой, не обладают монолитной двойной гранью и имеют меньшую прочность по сравнению с клееными или паяными сотами.
При выборе материала фольги и геометрических размеров поперечного сечения соты необходимо, чтобы критическое напряжение местной потери устойчивости стенки соты, как шарнирно опертой пластинки, было бы не менее предела текучести![]() материала
материала
![]() , ( 7 )
, ( 7 )
где Е – модуль упругости материала фольги.
Типовая диаграмма обжатия « F-h » сотового блока показана на рис.3.

Рис.3.Диаграмма обжатия сотового энергопоглотителя.
Для этой диаграммы характерно наличие пика силы в начальный период обжатия сотового блока. Чтобы убрать заброс по силе соты предварительно обжимают. После технологического обжатия сила сопротивления сотового блока смятию мало изменяется при относительной деформации ~ 90%. При этом коэффициент полноты диаграммы обжатия равен ![]() . Дальнейшее обжатие сот приводит к значительному увеличению силы и для амортизации не используется.
. Дальнейшее обжатие сот приводит к значительному увеличению силы и для амортизации не используется.
Энергия упругой отдачи сотовых энергопоглотителей незначительна, коэффициент отдачи k ≈ 0,02.
Предварительное обжатие сот позволяет не только снизить перегрузки при посадке, но и использовать их в конструкции ПА с большой точностью по усилию обжатия.
Для получения ступенчатой диаграммы обжатия применяют соты разной жесткости.
Работа сотового энергопоглотителя равна
А=![]() .
.
Диаграмма обжатия сотового блока, полученного путем склеивания, диаметром d=74мм из АМГ-Н, со стороной ячейки а =2,5мм, толщиной фольги ![]() =0,1мм и высотой
=0,1мм и высотой ![]() =100мм (после предварительного обжатия) показана на рис.4.
=100мм (после предварительного обжатия) показана на рис.4.

Рис.4 Диаграмма обжатия сотового блока.
На рис.5 показано сечение спускаемого аппарата «Венера-4,-8».

Рис.5. Спускаемый аппарат « Венера-4,-8»
1 - соты
Для амортизации аппарата при его неориентированной посадке по всей поверхности аппарата были установлены стеклосоты, которые совместно с асботекстолитом и сублимирующим стеклотекстолитом обеспечивали его теплозащиту.
Для обеспечения мягкой посадки спускаемого аппарата сотовые блоки могут устанавливаться в конструкциях ПУ консольного и рычажного типа.
На рис.6 показан посадочный аппарат « Викинг» для посадки на Марс.

Рис.6. Посадочный аппарат « Викинг».
1 – сотовый амортизатор, 2 – «V» - образный подкос, 3 – пята.
На ПА « Викинг» применено ПУ рычажного типа, состоящее из трех опор.
Амортизатор состоит из двух телескопически установленных труб. На одном конце внутренней трубы установлен поршень. Труба большего диаметра с помощью соединения ухо – вилка закреплена на корпусе ПА, труба меньшего диаметра аналогично закреплена на подкосе, на котором шарнирно установлена пята. Между поршнем и торцем внешней трубы размещен сотовый пакет.
Кинематическая схема опоры показана на рис.7.

Рис.7.Кинематическая схема опоры.
АС – амортизатор, АС΄- амортизатор после обжатия, ВС – подкос, h – ход амортизатора.
Из кинематической схемы опоры находим максимальный ход амортизатора ![]() , который реализуется при посадке аппарата на одну опору, с учетом обеспечения минимального безопасного клиренса. Кинетическая энергия аппарата, приходящаяся на одну опору:
, который реализуется при посадке аппарата на одну опору, с учетом обеспечения минимального безопасного клиренса. Кинетическая энергия аппарата, приходящаяся на одну опору:
![]() ,
,
где ![]() - редуцированная масса равная
- редуцированная масса равная  ,
,
![]() - массовый момент инерции аппарата,
- массовый момент инерции аппарата,
в – плечо от ЦМ до равнодействующей силы ![]() (см. Рис.8).
(см. Рис.8).

Рис.8. Схема посадки аппарата на одну опору.
![]() - нормальная реакция грунта,
- нормальная реакция грунта, ![]() - сила трения.
- сила трения.
![]() Из равенства кинетической энергии аппарата
Из равенства кинетической энергии аппарата ![]() работе амортизатора А, найдем усилия в амортизаторе
работе амортизатора А, найдем усилия в амортизаторе ![]()
![]()
![]() . (8 )
. (8 )
Принимаем, что относительная деформация сотового пакета равна ε = 80%. Тогда, начальная высота сотового пакета равна Н0=hмах/0,8.
Сотовые энергопоглотители использовались также в ПУ консольного типа КА «Аполлон».
Литература
Авдонин А.С., Фигурновский В.И. Расчет на прочность летательных аппаратов. – М.: Машиностроение, 1985.
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||