научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2009
DOI: 10.7463/1209.0134636
УДК 531.781
Введение. В настоящее время во всём мире проводятся работы по созданию хирургических робототехнических систем. Использование таких систем даёт хирургам дополнительные возможности в части совершенствования методик проведения хирургических операций (особенно в области минимально – инвазивной хирургии), улучшение эргономических показателей труда хирурга, а также открывает перспективу проведения телехирургических операций.
Врач, использующий в своей работе робот – манипулятор, взаимодействует с пациентом через него, что особенно важно при рассмотрении телехирургических систем. Для работы хирурга важна тактильная обратная связь, т.е. он должен ощущать пациента руками. Это необходимо для правильного дозирования усилий, развиваемых хирургом при выполнении манипуляций с хирургическими инструментами. Разработка хирургических робототехнических систем предполагает создание систем тактильной обратной связи, которые позволили бы обеспечить хирурга столь необходимой ему информацией о возникающих при взаимодействии с биологическими тканями усилиях.
Особое значение тактильная обратная связь приобретает в сосудистой хирургии. При выполнении внутрисосудистых хирургических операций типа ультразвуковой эндартерэктомии врач сталкивается сразу с двумя проблемами. Во – первых, он не видит рабочую часть инструмента внутри сосуда, а, во – вторых, усилие резания иногда снижается за счет ультразвука до уровня ниже порога чувствительности хирурга, что в ряде случаев не даёт ему возможности опереться на собственные ощущения.
Разрабатываемая в настоящее время робототехническая система для хирургии сосудов предполагает реализацию силовой обратной связи, которая могла бы позволить контролировать усилия, возникающие при взаимодействии хирургического инструмента с кровеносным сосудом. Первым звеном подобной системы тактильной обратной связи является ультразвуковой акустический узел снабженный чувствительными элементами. При создании очувствленного инструмента для ультразвуковой хирургии сосудов необходимо учитывать следующие факторы: 1) в своей работе врачи используют целый набор сменных инструментов, различающихся массой; 2) величина измеряемых усилий (до 300 грамм) соизмерима с весом акустического узла с установленным хирургическим инструментом; 3) необходимо учитывать влияние механических ультразвуковых колебаний и электромагнитного поля акустического узла на работу датчиков системы очувствления.
На рисунке 1 схематично показана работа ультразвуковым инструментом [1].
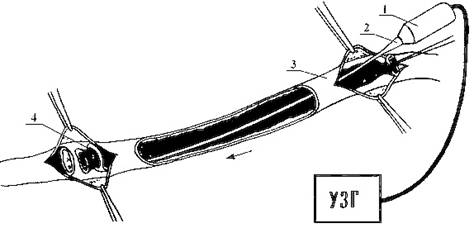
Рисунок 1 – Схема выполнения ультразвуковой эндартерэктомии. Стрелкой показано направление движения инструмента. 1 – акустический узел, 2 – инструмент, 3 – кровеносный сосуд, 4 – атеросклеротическая бляшка.
При создании системы очувствления для хирургического робота – манипулятора используется система изотропного упругого подвеса, состоящего из восьми упругих элементов с расположенными на них тензорезисторами, и позволяющего определить поперечную составляющую рабочей силы. Кроме того используется пьезодатчик силы для измерения осевой составляющей рабочей силы. Для устранения влияния силы веса подвижной части инструмента одновременно измеряется пространственное положение инструмента. Всего непрерывно обрабатываются одиннадцать сигналов. Все датчики расположены внутри магнитострикционного акустического узла от аппарата УРСК – 7Н – 21. В рассматриваемой конструкции ультразвуковая колебательная система оказывается подвешенной в измерительном подвесе, внутри корпуса инструмента. Особенностью системы является то, что она позволяет разделить продольную и поперечную компоненты вектора усилий приложенного к концу инструмента даже при сильном изгибе последнего.
Схема расположения упругих элементов. На рисунке 2 показана принципиальная схема рабочего инструмента: 1 – упругий стебель вместе с магнитострикционным узлом, 2 – корпус рукоятки. В корпусе рукоятки на расстоянии a0 расположены два изотропных в поперечном направлении упругих пояса А, В. Датчик осевой силы С располагается в торце корпуса. Кроме того, имеется еще двухосный гироскопический датчик, выходными сигналами которого являются углы поворота рукоятки как твердого тела в пространстве.
 |
Рисунок 2 – Схема расположения чувствительных элементов: А, В – два изотропных упругих пояса, С – пьезодатчик силы.
На рисунке 1 так же обозначены расстояния:
![]()
Главная особенность рассматриваемой компоновки состоит в том, что использование двух поясов датчиков ![]() позволяет определять поперченную составляющую внешнего (рабочего) усилия
позволяет определять поперченную составляющую внешнего (рабочего) усилия ![]() независимо от величины прогибов инструмента – рисунок 3. Малые повороты вибратора относительно корпуса рукоятки позволяют также независимо измерять осевую составляющую
независимо от величины прогибов инструмента – рисунок 3. Малые повороты вибратора относительно корпуса рукоятки позволяют также независимо измерять осевую составляющую ![]() . Каждый пояс упругого подвеса состоит из
. Каждый пояс упругого подвеса состоит из ![]() идентичных упругих элементов
идентичных упругих элементов ![]() . В настоящей конструкции в каждом поясе используются четыре упругих элемента. На упругих элементах располагаются тензорезисторы, которые коммутируются в зависимости от компоновки в единую схему для получения на выходе электрического сигнала, пропорционального поперечной силе, приложенной к соответствующему поясу.
. В настоящей конструкции в каждом поясе используются четыре упругих элемента. На упругих элементах располагаются тензорезисторы, которые коммутируются в зависимости от компоновки в единую схему для получения на выходе электрического сигнала, пропорционального поперечной силе, приложенной к соответствующему поясу.
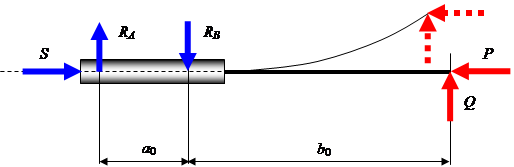 |
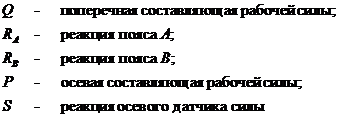
Рисунок 3 – Схема реакций на упругих опорах – ![]()
Из равновесия системы, представленной на рисунке 2, получаем связь между реакциями связей и действующими силами
где
Обработка сигналов от датчиков. Введем следующие обозначения
![]() – показания тензорезисторов пояса
– показания тензорезисторов пояса ![]() ;
;
![]() – показания тензорезисторов пояса
– показания тензорезисторов пояса ![]() ;
;
![]() – показания пьезодатчика осевой силы;
– показания пьезодатчика осевой силы;
![]() – показания угла положения рукоятки между горизонтальной плоскостью и осью рукоятки (рисунок 4)
– показания угла положения рукоятки между горизонтальной плоскостью и осью рукоятки (рисунок 4) ![]() ;
;
![]() – показания угла положения рукоятки между горизонтальной плоскостью и поперечным направлением рукоятки (горизонтальным при калибровке) осью рукоятки (рисунок 4)
– показания угла положения рукоятки между горизонтальной плоскостью и поперечным направлением рукоятки (горизонтальным при калибровке) осью рукоятки (рисунок 4) ![]() .
.
Таким образом, в реальном времени обрабатываются одиннадцать сигналов. При калибровке инструмента определяются положение центра масс инструмента и масса подвижной части.
 |
Рисунок 4 – Расположение двух базисов
Базис ![]() связан с неподвижным пространством. Ось
связан с неподвижным пространством. Ось ![]() имеет орт
имеет орт ![]() , направленным вертикально вверх, так что вектор ускорения свободного падения равен
, направленным вертикально вверх, так что вектор ускорения свободного падения равен ![]() . Оси
. Оси ![]() с ортами
с ортами ![]() расположены в горизонтальной плоскости. Базис
расположены в горизонтальной плоскости. Базис ![]() связан с рукояткой инструмента. Ось
связан с рукояткой инструмента. Ось ![]() направлена от пояса
направлена от пояса ![]() к поясу
к поясу ![]() . При калибровке орт
. При калибровке орт ![]() сонаправлен с ортом
сонаправлен с ортом ![]() .
.
При известных значениях массы подвижной части и положения центра масс и измеренных углах ориентации ![]() вычисляются составляющие от веса в сигналах тензорезисторов и пьезодатчика осевой силы:
вычисляются составляющие от веса в сигналах тензорезисторов и пьезодатчика осевой силы:
Далее рассматриваются разности измеренных сигналов и составляющих

В соответствии с компоновкой системы по величинам непосредственно определяются компоненты рабочей силы – ![]() .
.
Дополнительные вопросы. При работе необходимо обеспечить постоянное прижатие подвижной части инструмента к пьезодатчику осевого усилия (пьезодатчик осуществляет одностороннюю связь). Для этого в рукоятку встраивается осевая пружина с пренебрежимо малой поперечной жесткостью. Место опирания с ультразвуковым инструментом находится в узловом сечении продольной волны упругих вибраций. Информация о величинах рабочих усилий выводится на рукоятку в виде соответствующих световых сигналов. Повышенные требования предъявляются к изотропности упругих поясов ![]() (рисунок 1).
(рисунок 1).
Работа выполнена при поддержке Федерального агентства по науке и инновациям в рамках федеральной целевой научно - технической программы «Исследования и разработки по приоритетным направлениям развития научно – технологического комплекса России» на 2007 – 2012 годы.
СПИСОК ЛИТЕРАТУРЫ
1. Саврасов Г.В., Батанов А.Ф., Гусаров С.Г. Методика исследования рабочей зоны внутрисосудистых манипуляций. // Биомедицинская радиоэлектроника, ╧10, 2008 г., с. 52 – 59.
Публикации с ключевыми словами: робототехника, очувствление, тактильный подвес
Публикации со словами: робототехника, очувствление, тактильный подвес
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||