научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 02, февраль 2009
МГТУ им. Н.Э.Баумана,
mospf@list.ru
Как известно, в настоящее время для проведения геодезических и топографических работ с использованием спутниковой радионавигационной аппаратуры, где требуется высокоточная привязка объектов, в подавляющем большинстве случаев используются системы RTK (Real Time Kinematic) [1]. В основе таких алгоритмов лежит принцип совместной обработки фазовых измерений, полученных с двух (и более) разнесенных в пространстве навигационных приемников. Подобные системы, безусловно, обеспечивают высокую точность позиционирования, однако требуют наличия не менее двух навигационных приемников, надежного и достаточно скоростного (не менее 9,6 кбит/с) канала связи для передачи корректирующих данных. Канал связи, будь то радио-модем (UFH) или GSM-модем, потребляют дополнительные ресурсы батарей питания навигационного приемника, (в случае GSM модема следует также учитывать финансовые затраты на оплату трафика). В результате, аппаратура системы RTK отличается весьма высокой стоимостью.
В последнее время на рынке топографо-геодезических работ складываются тенденции удешевления применяемой аппаратуры, снижения ее эксплуатационной сложности.
Предлагаемая методика навигационно-временных измерений, позволяющая определять относительные координаты объектов с точностями порядка от единиц сантиметров до нескольких дециметров (СКО) вполне соответствует сложившимся тенденциям. Важно отметить, что при этом используется всего один навигационный приемник без привлечения каких-либо внешних корректирющих данных или применения интегрированных инерциальных навигационных систем.
Основное ограничение в применении рассматриваемого метода связана с ограничениями на продолжительность навигационного сеанса в соответствии с требованиями необходимой точности решения. Поэтому метод применим, в основном, к т.н. «локальным» задачам местоопределения (например, обмеру неких линийных или площадных объектов).
В основе данного метода лежит принцип накопления (интегрирования) и совместной обработки дискретных элементарных приращений координат при перемещении навигационного приемника от опорной точки к привязываемой точке. Другими словами, для получения оценки координат на каждый новый момент времени необходимо знание всех предыдущих приращений. Опорная точка может быть с известными координатами или нет. В последнем случае привязка будет происходить в относительных координатах (см. рис.1).
 |
|
Рис. 1. Перемещение приемника в процессе навигационного сеанса
|
Расчет приращения координат приемника между двумя близко расположенными временными отсчетами проводится на основе вычисления т.н. величины интегрального Доплера (дельта-фазы): разности фаз сигнала несущей частоты навигационного спутника, измеренной одним и тем же приемником для двух моментов времени. Запишем выражение для фазы сигнала спутника принятого приемником в некоторый момент времени t1 относительно фазы сигнала своего опорного генератора:
 |
При соблюдении условия непрерывности слежения за фазой i-го спутника на момент времени t2 > t1 выражение для фазы сигнала примет следующий вид.
 |
Проведя операцию нахождения разности фаз между моментами времени t1 и t2, получим:
 |
Итого, при условии непрерывного слежения за достаточным числом навигационных спутников среди неизвестных в данной системе уравнений остаются искомые приращения координат и целый ряд составляющих компонентов погрешностей, таких как смещения часов, воздействие ионосферы и тропосферы на радиосигнал, шумовая ошибка измерений и т.д. (см. рис.2). Часть этих погрешностей предлагается оценивать различными методами, в частности, ионосферные и тропосферные задержки.
 |
|
Рис. 2. Составляющие ошибки интегрального решения
|
Проводя интегрирование элементарных приращений координат (x,y,z) при перемещении приемника относительно начальной (опорной) точки к привязываемой точке получаем возможность оценки координат последней.
 |
Как видно из выражений 4,5 суммарная точность оцененных таким способом координат уменьшается при увеличении времени интегрирования, т.к. происходит накопление ошибок оценки элементарных приращений, и разумеется, в основном определяется величиной ошибок оценки элементарного приращения. Т.о. задача увеличения точности оценки приращения координат на единичном интервале приобретает особую важность в рамках данной задачи.
В случае использования фазовых измерений по СРНС ГЛОНАСС следует учитывать существенное влияние на конечную точность алгоритма некоторых параметров модели фазы пренебрежимо малых для модели GPS но требующих пристально внимания в случае ГЛОНАСС, а именно, пониженная точность эфемеридной информации и заметный уход часов навигационного спутника от системной шкалы. Пренебрежение этими параметрами ухудшает точность оценки элементарного приращения на относительно небольшую величину порядка нескольких мм, однако, при длительном накоплении суммарная ошибка приобретает заметный вес. Использование измерений ГЛОНАСС наряду с измерениями GPS потребует применения специальных алгоритмов для увеличения суммарной точности метода.
Для увеличения точности рассматриваемого алгоритма применительно к топографо-геодезическим работам была исследована специализированная техника проведения измерений, называемая "Замкнутая петля" (Closed Loop). В рамках этой техники предлагается помимо перемещения приемника от опорной точки к привязываемой точке, также осуществлять перемещение в обратном направлении в процессе текущего навигационного сеанса, т.е. возвращаться на исходную позицию (см. рис.3). Априорное знание того, что интеграл по замкнутому контуру равен нулю (перемещение по замкнутому контуру), мы получаем возможность оценить и учесть часть нескомпенсированных ранее ошибок и погрешностей (см. рис.4).
 |
|
Рис. 3. Перемещение приемника в процессе навигационного сеанса при использовании техники "Замкнутая петля".
|
 |
|
Рис. 4. Иллюстрация техники "Замкнутая петля".
|
Принцип действия техники "Замкнутая петля" проиллюстрирован на рисунке 4. Предположим, что в процессе навигационного сеанса приемник перемещался по замкнутой траектории и в итоге вернулся на исходную опорную точку. При этом была получена не нулевая величина интеграла перемещения, вызванная накапливающимися ошибками. Принимается линийная корректирующая модель, величина коррекции которой прямо пропорциональна длительности навигационного сеанса. Применяя полученную корректирующую функцию (обратная коррекция) к любой произвольной точке маршрута получаем возможность существено уменьшить величину ошибки позиционирования.
Блок-схема алгоритма представлена на рисунке 5. Рассмотрим ее подробнее. В ее состав входит кодо-фазовый фильтр Калмана, обеспечивающий расчет приращения позиции в соответствие с рассмотренным алгоритмом и проводящий частичную коррекцию ионосферной и тропосферной ошибки. Помимо приращений фильтр рассчитывает обычную (стандартную) позицию.
 |
|
Рис. 5. Блок-схема алгоритма.
|
Полученные приращения интегрируются в соостветсвие с командами инициализации и сброса. В результате имеем обычное интегральное решение. При возможности провидится обратная коррекция (метод "Замкнутая петля").
В ходе предварительных практических испытаний и последующей статистической обработки данных были получены следующие оценки точности позиционирования в зависимости от продолжительности интегрирования, Ts (времени навигацонного сеанса):
- единицы сантиметров при Ts=30-60 с
- дециметр при Ts=100-200 с
- единицы дециметров при Ts=300-600 с
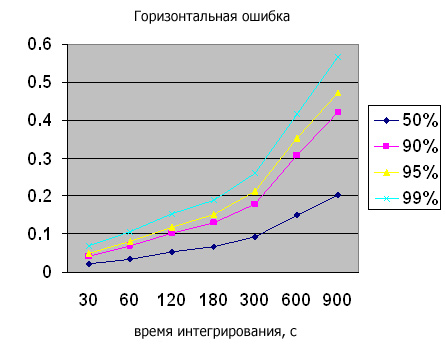
Для проведения статистической проверки алгоритма и исследования его точностных характеристик были сделаны многочисленные записи измерений с различных навигациооных приемников, различной длительности, в разное время суток, в различных погодных уловиях. Рассматриваемый алгоритм был многократно протестирован на записанных ранее измерениях в различных режимах и с различной длительностью интегрирования. Изходя из полученных данных оценки точности алгоритма были построены графические зависимости точности в зависимости от времени интегрирования для характерных вероятностых точек в 50, 90, 95, и 99 % (см. рис. 7- 9). Под вероятностой точкой понимается то, что с указанной вероятностью горизонтальная ошибка не превысит некоторого значения.
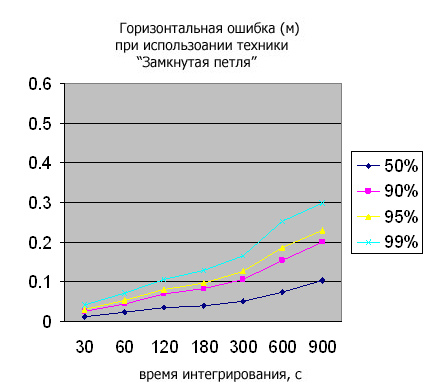
На рисунке 7 продемонстрирована зависимость горизонтальной ошибки позиционирования от времени интегрирования при использовании техники "Замкнутая петля". Хорошо заметно значительное увеличение точности по сравнению с обычным режимом измерений.
 |
|
Рис. 6. Зависимость горизонтальной ошибки позиционирования от времени интегрирования.
|
 |
|
Рис. 7. Зависимость горизонтальной ошибки позиционирования от времени интегрирования при использовании техники "Замкнутая петля".
|
Как уже упоминалось выше по тексту статьи, точность алгоритма сильно зависит от возможности компенсации различного рода составляющих ошибки вычисленного еденицного приращения позиции.
 |
|
Рис. 8. Зависимость горизонтальной ошибки позиционирования от времени интегрирования при использовании ионосферной коррекции по методу Клобушара.
|
 |
|
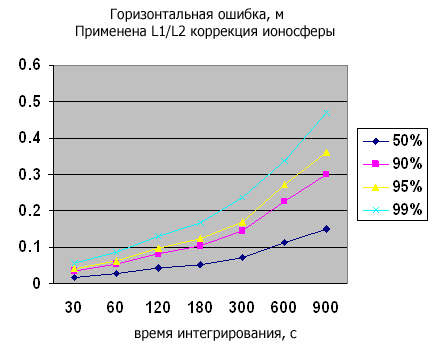
Рис. 9. Зависимость горизонтальной ошибки позиционирования от времени интегрирования при использовании ионосферной коррекции по двух- частотному методу (L1/L2 GPS).
|
На рисунке 8 и 9 продемонстрированы графики зависимости горизонтальной ошибки от времени интегрирования при сипользовании различных методов компенсации ионосферной погрешности, а именно с помощью медели Клобушара (см. [3], [4]) и двухчастотного метода (см. [3], [4]). Хорошо видно, что применение двухчастотного метода существенно улучшает точностые характеристики.
Помимо описанных здесь методов коррекции иносферы проводятся работы по исседованию возможности применения SBAS модели ионосферы, передаваемой в составе навигационного сообщения сутниками системы SBAS (WAAS, EGNOS, MSAS и GAGAN).
Практическая ценность алгоритма
- Применение данного алгоритма для задач топографо-геодезических работ по привязке различных объектов позволит получать решение с точностями порядка от нескольких см до нескольких дм (СКО) при существенном удешевлении и упрощении применяемого программно-аппаратного комплекса.
- Весьма важное применение данный алгоритм может найти в системах RTK как дополняющий элемент. Как известно, в канале передачи корректирующих данных зачастую случаются кратковременные (30-60 с) разрывы соединения (особенно характерно для GSM/GPRS - модемов). До момента повторного восстановления соединения мы получаем возможность в течение некоторого времени, определяемого допустимой точностью (порядка 1 минуты), поддерживать RTK решение или решение с пониженной точностью, которое, однако, позволит при восстановлении канала передачи данных в заметно меньшие сроки вновь получить точное RTK решение.
Список использованной литературы:
1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Петрова, В.Н. Харисова. Изд. 3-е, перераб. – М.: Радиотехника, 2005.
2. Жалило А.А., Яковченко А.И. “Радиоэлектроника. Известия ВУЗов”.-Т. 42, ╧12.- 1999.- С. 55-61
3. “Rover, Go Your Own Way”, Masayoshi Matsuoka, Maria G. Bualat, Stephen M. Rock; GPS World Magazine, Jun 1, 2004
4. Scott Pace, Gerald Frost, Irving Lachow. Interface Control Document ICD-GPS-200-C. The Global Positioning System. Assessing National Policies, RAND, MR-614-OSTP, 1993.
5. Global Positioning systems, inertial navigation and integration. MOHINDER S. GREWAL, LAWRENCE R. WEILL.
Публикации с ключевыми словами: система позиционирования, радионавигационные измерения
Публикации со словами: система позиционирования, радионавигационные измерения
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||